您現在的位置是:首頁 >財經 > 2020-12-11 09:13:33 來源:
新的過濾器增強了6維姿態估計的機器人視覺
導讀 機器人擅長進行相同的重復動作,例如在裝配線上進行簡單的任務。(拿起杯子。將其翻轉。放下。)但是,當它們在環境中移動時,它們缺乏感知物
機器人擅長進行相同的重復動作,例如在裝配線上進行簡單的任務。(拿起杯子。將其翻轉。放下。)但是,當它們在環境中移動時,它們缺乏感知物體的能力。(一個人拿起杯子,將其放到隨機的位置,機器人必須取回它。)最近的研究是由伊利諾伊大學厄本那-香檳分校,英偉達公司,華盛頓大學和斯坦福大學的研究人員進行的。大學在6D對象姿態估計上開發了一個濾波器,以賦予機器人更大的空間感知能力,以便他們可以操縱對象并更精確地在空間中導航。
而3-d姿勢提供位置信息上X,Y,和的Z軸相對位置對象相對于相機-6D姿態給出一個更全面的了解。“與描述飛行中的飛機非常相似,機器人還需要了解物體方向的三個維度-偏航,俯仰和滾動,”與該系副教授Timothy Bretl一起學習的博士生Xinke Deng說。 I of U航空航天工程學院
在現實環境中,所有六個維度都在不斷變化。
鄧說:“我們希望機器人能夠在物體從一個位置移動到另一個位置時繼續跟蹤。”
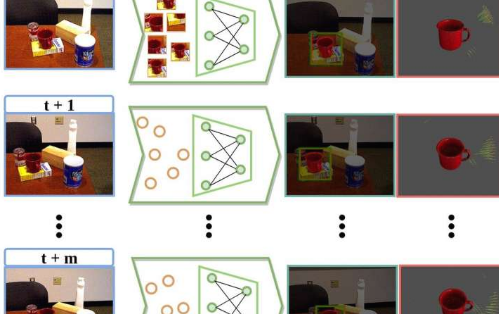
鄧解釋說,這項工作是為了改善計算機視覺而完成的。他和他的同事開發了一個過濾器,以幫助機器人分析空間數據。濾鏡查看每個粒子或相機針對某個對象收集的圖像信息,以幫助減少判斷錯誤。
鄧說:“在基于圖像的6D姿態估計框架中,粒子濾波器使用大量樣本來估計位置和方向。” “每個粒子都像一個假設,是對我們要估計的位置和方向的猜測。粒子過濾器使用觀察來計算其他粒子信息的重要性值。該過濾器消除了錯誤的估計。
鄧說:“我們的程序不僅可以估計單個姿勢,還可以估計物體方向的不確定性分布。” “以前,還沒有一種系統來估計物體方向的全部分布。這為機器人的操縱提供了重要的不確定性信息。”
")





")
")
")
")
")
")
")
")
")
")