您現在的位置是:首頁 >財經 > 2020-11-26 08:55:53 來源:
新的汽車雷達發現危險隱患
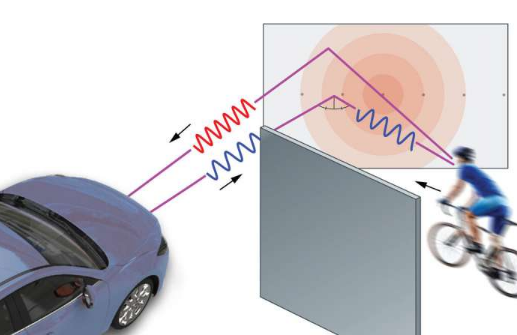
該系統易于集成到當今的車輛中,使用多普勒雷達從建筑物和停放的汽車等表面反射無線電波。雷達信號以一定角度撞擊表面,因此其反射像母球撞擊臺球桌的墻壁一樣反彈。信號繼續擊中拐角處隱藏的物體。某些雷達信號會反射回安裝在汽車上的探測器,從而使系統可以看到拐角處的物體并判斷它們是在運動還是靜止。
普林斯頓大學計算機科學助理教授費利克斯·海德說:“這將使汽車能夠看到當今的激光雷達和攝像頭傳感器無法記錄的被遮擋的物體,例如,使自動駕駛汽車能夠看到危險的交叉路口。”研究人員。“雷達傳感器的成本也相對較低,特別是與激光雷達傳感器相比,并且可以大規模生產。”
在6月16日于本屆計算機視覺和模式識別(CVPR)會議上發表的一篇論文中,研究人員描述了該系統如何區分包括汽車,自行車和行人在內的物體,并測量其方向和迎面駛來的速度。
這組作者寫道:“所提出的方法允許在現實世界中的自動駕駛場景中為行人和騎自行車的人提供碰撞預警,然后再使用直接的視線傳感器看到他們。”
近年來,工程師開發了各種傳感器系統,這些系統可使汽車檢測道路上的其他物體。它們中的許多依賴于使用可見光或近紅外光的激光雷達或相機,并且這種防止碰撞的傳感器現在在現代汽車中很常見。但是,光學感應很難用于將物品識別出汽車的視線。在早期的研究中,海德的團隊使用光來觀察隱藏在拐角處的物體。但是,這些努力目前尚不適用于汽車,因為它們都需要高功率的激光器并且限于近距離。
在進行較早的研究時,海德和他的同事們想知道是否有可能創建一個系統來使用成像雷達而不是可見光來檢測汽車視線之外的危險。對于雷達系統而言,光滑表面上的信號損耗要低得多,雷達是一種成熟的跟蹤物體技術。挑戰在于,雷達的空間分辨率(用于拍攝拐角處的物體,例如汽車和自行車)的相對分辨率較低。但是,研究人員認為,他們可以創建算法來解釋雷達數據,以使傳感器正常工作。
")





")
")
")
")
")
")
")
")
")
")