您現在的位置是:首頁 >財經 > 2020-11-25 09:32:06 來源:
研究人員開發了用于軟機器人的實時物理引擎
如今,電影動畫和視頻游戲令人印象深刻,栩栩如生,捕捉到一縷頭發垂落在女主人公的眼睛上,或一幅帆布風帆在風中飄揚。來自加利福尼亞大學洛杉磯分校(UCLA)和卡內基梅隆大學的合作者首次采用了這種復雜的計算機圖形技術來模擬柔軟的四肢機器人的運動。
研究結果于5月6日發表在《自然通訊》上,論文名為“鉸接式軟機器人的動態仿真”。
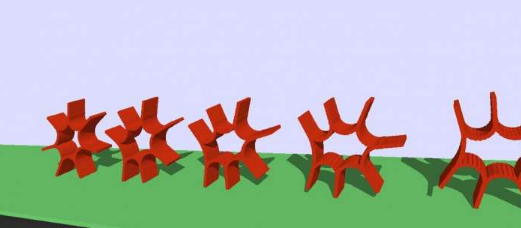
研究作者機械和航空航天學助理教授哈立德·賈維德(Khalid Jawed)表示:“我們比軟機器人的實時仿真要快,這是向此類具有自主性并可以自行計劃動作的機器人邁出的重要一步。 UCLA Samueli工學院的工程學。“軟機器人由柔性材料制成,這使它們本質上具有抵抗損壞的彈性,并且在與人互動時可能更加安全。在進行此項研究之前,預測這些機器人的運動一直是一項挑戰,因為它們會在運行過程中改變形狀。”
電影通常使用稱為離散彈性桿(DER)的算法來為自由流動的物體設置動畫。DER可以在一秒鐘內預測數百個運動。研究人員希望使用DER創建一個物理引擎,該引擎可以模擬受生物啟發的機器人以及挑戰性環境(例如火星表面或水下)中機器人的運動。
另一種基于算法的技術,即有限元方法(FEM),可以模擬固體和剛性機器人的運動,但它不適用于解決柔和自然運動的復雜情況。它還需要大量時間和計算能力。
迄今為止,機器人專家一直使用艱辛的反復試驗過程來研究軟材料系統的動力學,軟機器人的設計和控制。
卡內基梅隆大學工程學院機械工程學副教授卡梅爾·馬吉迪說:“用硬而堅硬的材料制成的機器人相對容易使用現有的計算機仿真工具建模。” “到目前為止,還沒有很好的軟件工具來模擬柔軟而柔軟的機器人。我們的工作是第一批演示如何使用用于建模頭發的相同計算機圖形軟件來成功模擬軟機器人的工作之一。以及大片和動畫電影中的面料。”
研究人員三年前開始在Majidi的Soft Machines Lab中合作。Jawed繼續他們在這項最新工作上的合作,在UCLA的研究實驗室中進行了模擬,而Majidi進行了物理實驗,然后進行了驗證模擬結果的物理實驗。
該研究部分由陸軍研究辦公室資助。
美國陸軍作戰能力發展司令部陸軍研究實驗室成員,陸軍研究辦公室項目經理塞繆爾·斯坦頓博士(Samuel Stanton)說:“軟機器人的實驗進展已經超過了理論幾年。” “這項努力是我們預測和設計動力學和控制能力的重要一步,該機器人在具有復雜接觸和不斷變化的環境的受限空間中運行的高度變形的機器人中。”
研究人員目前正在努力將該技術應用于其他種類的軟機器人,例如受細菌和海星運動啟發的那些。這種游泳機器人可以完全不受束縛,并可以在海洋學中用于監視海水狀況或檢查脆弱的海洋生物的狀況。
新的仿真工具可以大大減少將軟機器人從繪圖板引入應用程序所需的時間。盡管機器人距離自然系統的效率和功能還差得很遠,但是計算機仿真可以幫助縮小這一差距。
")





")
")
")
")
")
")
")
")
")
")