您現在的位置是:首頁 >財經 > 2020-11-25 09:32:11 來源:
機器人硬件的柔和觸感
機器人可以由柔軟的材料制成,但是此類機器人的靈活性受到其控制所必需的剛性傳感器的限制。研究人員創建了嵌入式傳感器來替代剛性傳感器,該傳感器具有相同的功能,但為機器人提供了更大的靈活性。軟機器人比傳統的剛性設計更具適應性和彈性。該團隊使用最先進的機器學習技術來創建他們的設計。
自動化是一個日益重要的主題,而這一概念的核心是機器人技術和機器學習的成對領域。機器學習和機器人技術之間的關系不僅限于機器人的行為控制,而且對其設計和核心功能也很重要。在現實世界中運行的機器人需要了解其環境和自身,才能導航和執行任務。
如果世界是完全可預測的,那么機器人將可以在不需要學習任何有關環境的新知識的情況下四處走動。但是現實是不可預測的,并且會不斷變化,因此機器學習可以幫助機器人適應陌生的情況。盡管從理論上講對所有機器人都是如此,但對于軟體機器人而言,這尤其重要,因為它們的物理屬性本質上比剛性機器人更難預測。
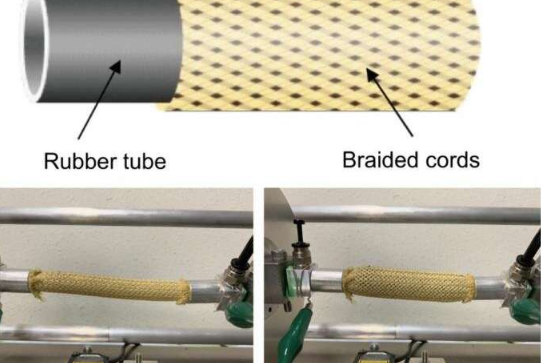
信息科學與技術學院副教授中島耕平(Kohei Nakajima)說:“例如,一個帶有氣動人工肌肉(PAM),橡膠和纖維的流體驅動系統的機器人,它們會伸縮以移動。” “ PAM固有地會受到隨機的機械噪聲和磁滯的影響,這基本上是隨時間的物質壓力。基于激光的精確監視器有助于通過反饋來維持控制,但是這些剛性傳感器限制了機器人的運動,因此我們想出了一些新方法。”
Nakajima和他的團隊認為,如果他們可以實時對PAM建模,那么他們可以保持對它的良好控制。但是,鑒于PAM的性質不斷變化,這對于傳統的機械建模方法是不現實的。因此,團隊轉向了一種強大而成熟的機器學習技術,稱為儲層計算。在這里,有關系統的信息(在本例中為PAM)被實時輸入到特殊的人工神經網絡中,因此模型不斷變化,因此適應環境。
中島說:“我們發現PAM材料的電阻在收縮過程中會根據其形狀而變化。因此,我們將這些數據傳遞給網絡,以便它可以準確地報告PAM的狀態。” “普通橡膠是絕緣體,因此我們將碳結合到我們的材料中以更容易地讀取其變化的電阻。我們發現該系統在一系列測試條件下以同樣的高精度模擬了現有的激光位移傳感器。”
由于這種方法,新一代的軟機器人技術可能成為可能。這可能包括與人類合作的機器人,例如可穿戴的康復設備或生物醫學機器人,因為額外的柔軟觸感意味著與它們的交互是溫和且安全的。
中島說:“我們的研究表明,儲層計算還可以用在機器人技術之外的應用中。需要以分散方式處理實時信息的遙感應用可以大大受益。” “以及其他研究神經形態計算(智能計算機系統)的研究人員,也可能能夠將我們的想法納入自己的工作中,以改善系統的性能。”
")





")
")
")
")
")
")
")
")
")
")