您現在的位置是:首頁 >人工智能 > 2021-11-09 16:38:42 來源:
靈巧的機械手輕松操縱數千個物體
剛滿一歲的嬰兒比機器人還靈巧。當然,機器可以做的不僅僅是撿起和放下物體,但就復制對探索性或復雜靈巧操作的自然拉力而言,我們還沒有完全到位。
OpenAI 嘗試了“Dactyl”(在希臘語 daktylos 中的意思是“手指”),使用他們的人形機器人手用軟件解決魔方,這是邁向更通用人工智能的一步,與常見的單一-任務心態。DeepMind 創建了“ RGB-Stacking ”,這是一個基于視覺的系統,它挑戰機器人學習如何抓取物品并堆疊它們。
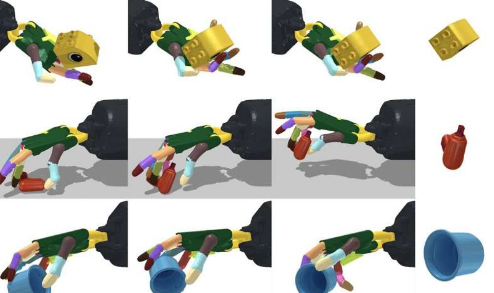
麻省理工學院計算機科學與人工智能實驗室 (CSAIL) 的科學家們一直在尋求讓機器復制人類的能力,他們創建了一個更大的框架:一個可以用機械手重新定向 2000 多個不同物體的系統面朝上和朝下。這種操縱從杯子到金槍魚罐頭和 Cheez-It 盒子的任何東西的能力,可以幫助手以特定的方式和位置快速拾取和放置物體,甚至可以推廣到看不見的物體。
這種靈巧的“手工”——通常受單一任務和直立位置的限制——可以成為加速物流和制造的資產,有助于滿足常見需求,例如將物品裝入插槽中進行裝配,或靈巧地操縱范圍更廣的工具。該團隊使用了具有 24 個自由度的模擬擬人手,并展示了該系統可以在未來轉移到真正的機器人系統的證據。
“在工業中,平行爪夾持器最常用,部分原因是它控制簡單,但它在物理上無法處理我們在日常生活中看到的許多工具,”麻省理工學院 CSAIL 博士說。學生陳濤,Improbable AI Lab 成員,該項目的首席研究員。“即使使用鉗子也很困難,因為它不能靈巧地來回移動一個手柄。我們的系統將允許多指手靈巧地操縱此類工具,這為機器人應用開辟了一個新領域。”
幫幫我
由于需要控制大量電機以及手指與物體之間接觸狀態的頻繁變化,這種類型的“手持”物體重新定向一直是機器人技術中的一個具有挑戰性的問題。該模型有超過 2000 個對象,需要學習很多東西。
當手朝下時,問題變得更加棘手。機器人不僅需要操縱物體,還需要避開重力使其不會掉落。
該團隊發現一種簡單的方法可以解決復雜的問題。他們使用了一種無模型強化學習算法(意味著系統必須從與環境的交互中找出價值函數)和深度學習,以及一種稱為“師生”訓練方法。
為此,“教師”網絡接受了有關物體和機器人的信息進行訓練,這些信息在模擬中很容易獲得,但在現實世界中卻沒有,例如指尖的位置或物體速度。為了確保機器人可以在模擬之外工作,“老師”的知識被提煉為現實世界中可以獲取的觀察結果,例如攝像機捕獲的深度圖像、物體姿態和機器人的關節位置。他們還使用了“重力課程”,機器人首先在零重力環境中學習技能,然后慢慢地讓控制器適應正常的重力條件,當以這種速度處理事情時,確實提高了整體性能。
雖然看似違反直覺,但單個控制器(稱為機器人的大腦)可以重新定向大量它以前從未見過的物體,并且不知道形狀。
“我們最初認為在機器人操縱物體時推斷形狀的視覺感知算法將是主要挑戰,”麻省理工學院教授 Pulkit Agrawal 說,他是該研究論文的作者。“相反,我們的結果表明,人們可以學習與形狀無關的強大控制策略。這表明視覺感知對于操縱的重要性可能遠不如我們習慣的思維方式重要,而更簡單的感知處理策略可能就足夠了。”
許多小的圓形物體(蘋果、網球、彈珠)在用手向上和向下重新定位時的成功率接近 100%,不出所料,對于更復雜的物體,如勺子,成功率最低,一把螺絲刀或剪刀,接近三十歲。
除了將系統投入使用之外,由于成功率因對象形狀而異,因此該團隊指出,未來,基于對象形狀訓練模型可以提高性能。
陳與麻省理工學院 CSAIL 博士一起撰寫了一篇關于這項研究的論文。學生Jie Xu和麻省理工學院教授Pulkit Agrawal。它將在 2021 年機器人學習會議 (CoRL) 上發表。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")