您現在的位置是:首頁 >人工智能 > 2021-05-01 15:42:11 來源:
跳躍機器人的Somersaulting模擬
近年來,工程師們一直在開發新技術,使機器人和人類能夠更快地移動并跳得更高。柔軟,有彈性的材料可以在這些裝置中儲存能量,如果小心釋放,可以實現優雅的動態運動。機器人跳過障礙物和假肢能夠沖刺。開發這些技術仍然存在根本性挑戰。科學家們花費很長時間來構建和測試能夠以特定方式可靠移動的原型,以便例如機器人在著陸時能夠正確地著陸。
由麻省理工學院(MIT),多倫多大學和Adobe Research的研究人員團隊開發的一對新計算方法邁出了實現這些運動背后動態機制設計自動化的第一步。他們的方法生成的仿真與靈活設備的實際行為相匹配,速度比以前快70倍,并提供模擬碰撞和回彈精度的關鍵性改進。這些方法既快又準確,足以用于自動化用于創建受控跳躍的動態機制的設計過程。
該團隊將在7月30日至8月3日在洛杉磯召開的SIGGRAPH 2017年會議上,通過他們的論文“動態感知數據粗化制造設計”展示他們的方法和結果。SIGGRAPH突出了全球計算機圖形研究和互動技術中最具創新性的成果。
“這項研究是將計算機圖形技術應用于具有動態行為和接觸的真實物理對象的開創性工作,”主要作者Desai Chen說,他是麻省理工學院計算機科學與人工智能實驗室(CSAIL)的博士候選人。“我們開發的技術為自動設計高動態,快速移動的物體打開了大門。”
陳的合著者包括多倫多大學助理教授David IW Levin; 麻省理工學院電子工程與計算機科學副教授Wojciech Matusik; 和Adobe Research的高級研究科學家Danny M. Kaufman。
計算設計,物理建模和快速制造方面的重大進步使得能夠制造具有定制物理特性的物體 - 例如定制運動鞋,復雜假肢和軟機器人 - 而計算機圖形學研究已經看到快速改進和效率創造引人注目的動畫物理學的游戲,虛擬現實和電影。在這項新工作中,該團隊旨在將效率和準確性結合起來,實現設計制造的仿真,并精確模擬運動中的物體。
“我們的目標是讓虛擬現實的物理規則更接近實際現實,”萊文說。
在研究中,團隊通過模擬彈性物體碰撞來應對挑戰 - 使事物足夠精確以匹配現實,并且足夠快以使設計過程自動化。試圖在存在接觸,撞擊或摩擦的情況下創建這種模擬仍然是耗時且不準確的。
“這一部分是正確的非常重要,而且,直到現在,我們現有的計算機代碼往往會在這里發生故障,”考夫曼說。“我們意識到,如果我們為現實世界進行設計,我們必須擁有能夠正確模擬高速彈跳,碰撞和摩擦等事物的代碼。”
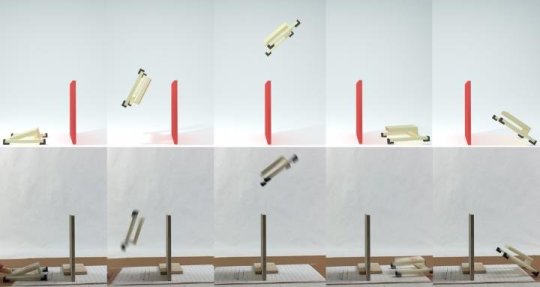
研究人員通過設計和制造翻轉,拋擲和跳過障礙物的機制,展示了他們的新方法,動態感知粗化(DAC)和邊界平衡碰撞(BBI)。他們的方法比現有的最先進的方法更快地執行模擬,并且與現實世界的運動相比具有更高的準確性。
DAC的工作原理是減少自由度,編碼運動的值的數量,加速模擬,同時仍然捕捉動態場景的重要動作。它找到最粗糙的網格,可以正確地表示動態采用的關鍵形狀,并將這些網格的材質屬性直接與錄制的視頻實驗相匹配。BBI是一種用于對彈性物體的撞擊行為進行建模的方法。它使用材料屬性在沖擊位置附近平滑地投射速度,以模擬許多真實世界的沖擊情況,例如軟印刷材料和桌子之間的沖擊和回彈。
該團隊的靈感來自對更快,更精確的設計工具的需求,這些工具可以捕獲經歷變形和碰撞的彈性物體的精確模擬 - 尤其是在高速時。這些新方法可以應用于機器人設計,開發機器人,因為它們越來越多地采用類似人類的運動和特征。
“這個項目真的是我們推動模擬現實方法的第一步,”考夫曼說。“我們專注于推動它們進行自動設計并探索如何在設計中有效地使用它們。我們可以在計算機圖形和動畫中創建漂亮的圖像,讓我們將這些方法擴展到現實世界中實用的對象,這些對象是有用的,美觀的和高效的“。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")