您現在的位置是:首頁 >人工智能 > 2021-04-30 18:40:36 來源:
HAMR-E哈佛機器人 讓世界顛倒過來
導讀 哈佛大學的研究人員創建了一個微型的機器人牛逼動態電附著力(HAMR-E)。這是一個很小的機器人,可以探索小空間。
憑借其電吸盤,微型機器人
哈佛大學的研究人員創建了一個微型的機器人牛逼動態電附著力(HAMR-E)。這是一個很小的機器人,可以探索小空間。
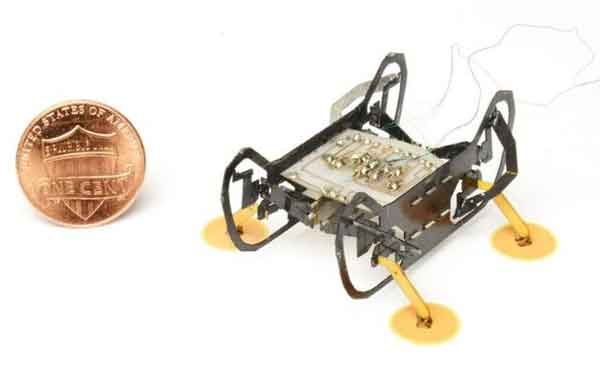
憑借其電吸盤,微型機器人甚至可以去非常深,非常小的地方,也就是說,達不到對人類,甚至反向。科學家們響應來自勞斯萊斯的挑戰開發這個小機器人。
這種發明的用處很簡單:如果研究人員設法將相機和工具運送到這臺小型機器上,就不再需要拆卸復雜的設備,比如勞斯萊斯的噴氣發動機,檢查和/或修理。同樣,如果表面具有導電性,HAMR-E可以探測倒置的空間。
對于研究人員來說,這種微型機器人具有很大的潛力和實用性。
一個有四個旋轉腿的機器人
HAMR-E的支腳由聚酰亞胺制成,它是絕緣銅電極,在導電表面和微機器人的“粘性”焊盤之間產生靜電力。
后者也能夠顛倒過來。他的三只腳緊貼著表面,以防止他滑倒,而他的第四只腳走到前面以進一步固定自己。
該特定步驟引起機器人腿部的旋轉。科學家創造了從折紙想象的踝關節。聚酰亞胺和玻璃纖維層折疊成一個結構,允許機器人的釘子自由旋轉,并適應它探索的表面。
對工程師有用的發明
目前,研究人員正忙著尋找一種方法來防止迷你機器人失去平衡和摔倒。
他們還致力于如何使HAMR-E在非導電表面上工作。
該項目的共同作者羅伯特伍德說,HAMR-E是最有說服力的證據,證明設計一個厘米攀爬機器人是可能的,并且這種機器人將來可以用來探索各種基礎設施,如管道,電動機,發電機等。
他還指出,這項發明是學術界和工業界科學家努力開發的創新技術和產品,有助于解決工程師每天可能面臨的問題。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")