您現在的位置是:首頁 >人工智能 > 2021-04-28 12:25:22 來源:
壁虎粘合技術更接近工業用途
墻壁上或墻壁上的壁虎長期以來一直讓科學家著迷,并鼓勵他們研究如何利用蜥蜴的神秘能力來抵抗重力。
雖然近年來出現了受壁虎腳啟發的人造設備,使其佩戴者能夠慢慢縮放玻璃墻,但壁虎粘合技術的可能應用遠遠超出了蜘蛛俠式的滑稽動作。
喬治亞理工學院的一名研究人員正在研究如何將該技術應用于高精度工業環境,例如用于制造計算機芯片的機器人手臂。
“有許多方法可以在工業環境中使用壁虎粘合劑,特別是處理精密材料,如用于制造計算機處理器的硅晶片,”喬治亞理工學院George W. Woodruff機械工程學院助理教授Michael Varenberg說。 。
但在機器人手臂和其他設備可以實現壁虎粘附技術之前,研究人員需要更多關于人造粘合劑表面的機械和物理特性的信息。
在12月13日發表在皇家學會界面雜志上的一項研究中,Varenberg研究了一種特殊類型的壁虎式粘合劑表面,并縮小了一系列角度,使材料更牢固,更容易釋放。
壁虎通過使用與分子間水平的表面相互作用的微小毛發獲得其獨特的能力。這是一個一兩個過程,在此過程中,微小的薄膜狀毛發被壓在表面上并與剪切動作相結合。然后它們要么保持在表面,要么在向不同方向拉開時容易釋放。
為了在工廠中使用人造粘合劑技術復制該過程,研究人員必須確定施加載荷以獲得或釋放機械臂和硅晶片之間夾具的精確角度。
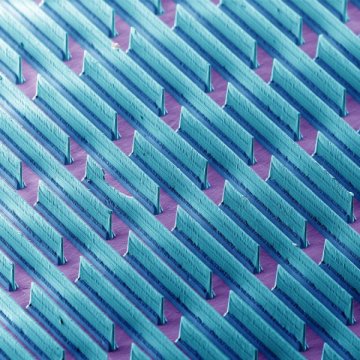
Varenberg的團隊測試了由聚乙烯基硅氧烷模塑而成的壁形微結構表面,旨在模仿壁虎的附著能力。他們的測試表明,最佳連接角度在60到90度之間變化,而當拉出角度達到140-160度時,微觀結構在零力時分離。
“對于這些壁形微結構來說,控制連接和拉開的相對較寬的范圍將使圍繞該公差的機械過程更容易構建,”Varenberg說。
這可能有望取代在計算機處理器生產中處理和檢查硅晶片期間使用的當前方法。機器人手臂采用陶瓷卡盤,使用真空或靜電夾具拾取和處理晶圓。安裝后不久,陶瓷接觸柱由于循環加載而開始磨損并釋放可能污染晶片背面的顆粒,導致其正面的光刻缺陷。
“這種現實與半導體行業所要求的清潔標準不一致,”Varenberg說。“使用壁虎粘附微結構代替會更好,因為它們不會對晶圓造成任何損壞,也不會隨著時間的推移而磨損。”
Varenberg說,研究的后續步驟包括簡化制造技術,使用工業級材料以及研究環境和表面幾何參數的影響。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")