您現在的位置是:首頁 >人工智能 > 2021-04-27 16:18:10 來源:
機器人技術的新時代:3D打印機器人堅硬 外面柔軟
哈佛大學和加利福尼亞大學圣地亞哥分校的工程師們創造了第一臺機器人,其3D打印機身從剛性核心過渡到柔軟的外部。該機器人能夠進行超過30次不受限制的跳躍,并由丁烷和氧氣混合提供動力。研究人員在7月10日的“ 科學 ”雜志上描述了機器人的設計,制造和測試。
“我們相信,將軟質和剛性材料結合在一起將有助于創造新一代快速,靈活的機器人,這些機器人比以前的機器人更加強大和適應性更強,可以安全地與人類并肩工作,”機械助理教授邁克爾托利說。加州大學圣地亞哥分校的工程學博士,以及該論文的副主編之一,尼古拉斯巴特利特博士,博士。哈佛大學Wyss學院的學生,大部分工作都在那里進行。Bartlett和Tolley設計,制造并測試了機器人。
Tolley說,將軟硬材料混合到機器人體內的想法來自大自然。例如,某些種類的貽貝的腳開始變軟,然后在與巖石接觸的地方變得僵硬。“在本質上,復雜性的成本非常低,”托利說。“使用像3D打印這樣的新制造技術,我們正試圖將其轉化為機器人技術。”
Tolley說,軟機器人往往很慢,特別是在完成任務時沒有受到電源和其他電子設備的束縛,他最近共同撰寫了一份關于自然軟機器人的研究評論(Rus,Tolley,v.521,pp.467- 475)。研究人員希望他們的工作能夠將剛性部件更好地集成到軟機器人中,然后軟機器人將更快地移動而不會影響與他們一起工作的人的安全。
對于科學中描述的機器人,剛性層使得與設備的電子腦和電源的接口更好。柔軟的層使其在跳躍后降落時不易受到損壞。
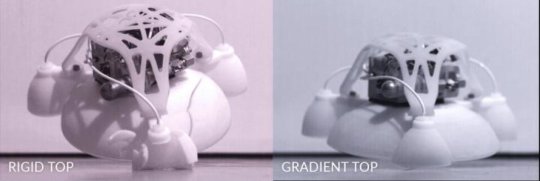
機器人由兩個嵌套的半球組成。頂部半球就像一個半殼,一次性3D打印,具有九層不同的剛度,創造出一種從外部的橡膠般的柔韌性到靠近核心的完全剛性的結構。研究人員嘗試了幾種版本的設計,并得出結論,完全剛性的頂部可以實現更高的跳躍。但是更靈活的頂部更有可能在著陸時受到影響,允許機器人重復使用。他們決定采用更靈活的設計。
Tolley說,這個過程中一個具有挑戰性的部分是設計可用于3D打印機器人的現成材料。制造商提供的規格不夠詳細,因此他和他的共同作者打印樣本以測試他們使用的每一種材料。他們收集的數據使他們能夠計算機器人上半部分中九個不同層的精確剛度。他們使用這些信息來模擬機器人的性能并加快設計過程。
機器人的下半部分是靈活的,包括一個小室,在跳躍之前注入氧氣和丁烷。氣體被點燃后,這一半的表現非常像籃球幾乎瞬間充氣,推動機器人跳躍。當化學電荷耗盡時,底部半球恢復其原始形狀。
兩個半球圍繞著一個剛性核心模塊,其中包含定制電路板,高壓電源,電池,微型空氣壓縮機,丁烷燃料電池和其他組件。在一系列測試中,機器人橫向跳躍了2.5英尺(0.75米)高,半英尺(0.15米)。在實驗中,機器人跳了100多次,并從近四英尺的高度再度下降了35次。
托利是哈佛大學的博士后助理,當時他完成了本文的大部分工作。他于2014年秋季在加州大學圣地亞哥分校受雇。在加州大學圣地亞哥分校Jacobs工程學院的實驗室里,他借鑒了大自然的設計,設計了由軟材料組成的機器人。折疊機器人; 和自組裝的機器人。他計劃在未來幾年進一步探索和拓展具有生物學啟發的機器人技術領域。
")









")
")
")
")
")
")
")
")
")