您現在的位置是:首頁 >人工智能 > 2021-04-22 18:30:47 來源:
關閉機器人抓住循環
澳大利亞布里斯班 - 昆士蘭科技大學(QUT)的工程師為機器人開發了一種更快,更準確的方法,可以在雜亂和變化的環境中抓取物體。
新方法使機器人能夠快速掃描環境并使用3D圖像映射其捕獲的每個像素。它基于生成性的卷積神經網絡。
“雖然掌握和拾取物體是人類的一項基本任務,但事實證明它對機器來說非常困難,”昆士蘭科技大學電子工程和計算機科學教授Jurgen Leitner博士說。“這個世界是不可預測的 - 事情會發生變化,變化和混亂,而且往往會在沒有警告的情況下發生。因此,如果我們希望機器人有效,機器人需要能夠在非結構化環境中適應和工作。
“我們已經能夠在非常受控的環境中對機器人進行編程,以獲取非常具體的物品,”Leitner解釋道。“然而,當前機器人抓取系統的一個關鍵缺點是無法快速適應變化,例如當物體移動時。”
神經網絡方法通過預測每個像素處的雙指抓握的質量和姿勢來工作。通過在一次通過中使用深度圖像映射其前面的內容,機器人在做出決定之前不需要采樣許多不同的可能的抓取,從而避免了長的計算時間。
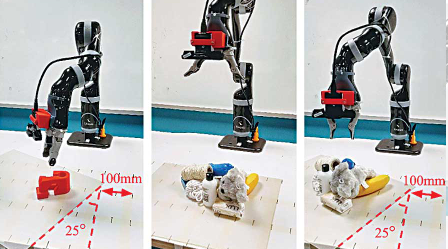
“在我們的實際測試中,我們在一組先前看不見的具有對抗幾何形狀的物體上獲得了83%的抓握成功率,并且在抓握嘗試期間移動的一組家用物品上獲得了88%的成功率,”Leitner聲稱。“在掌握動態雜亂時,我們也達到了81%的準確率。”
根據Leitner的說法,他和他的同事克服了當前深度學習抓取技術的一些局限性。
“例如,在我們的團隊2017年贏得的亞馬遜采摘挑戰賽中,我們的機器人CartMan會查看一個物體箱,決定抓住物體的最佳位置,然后盲目進去嘗試挑選它,“萊特納說。
“使用這種新方法,我們可以處理機器人在大約20毫秒內觀察到的物體的圖像,這使得機器人可以更新其在何處抓住物體的決定,然后以更大的目的進行更新,”Leitner聲稱。“這在雜亂的空間中尤為重要。
“這項研究使我們能夠使用機器人系統,而不僅僅是在基于機器人功能構建整個工廠的結構化設置中,”Leitner指出。“它還使我們能夠抓住非結構化環境中的物體,在這些環境中,事物沒有完美的計劃和有序,機器人需要適應變化。”
Leitner表示,該技術的潛在應用包括裝配線,倉庫和水果采摘。“它也可以應用于家庭,因為更智能的機器人不僅可以吸塵或拖地,還可以拾取物品并將其丟棄,”他解釋道。
")









")
")
")
")
")
")
")
")
")