您現在的位置是:首頁 >要聞 > 2020-12-18 15:26:39 來源:
水性可重構機器人可以為地下管網檢查提供新的解決方案
謝菲爾德大學的研究人員創造了一種水上機器人,可以在水下搜索和營救行動中使用。
研究人員將于本周晚些時候在今年于瑞典斯德哥爾摩舉行的國際機器人與自動化國際會議(ICRA 2016)上揭示他們的發現。
這項研究著眼于一組機器人模塊,這些模塊類似于Lego,可以組裝成任意形狀的機器人。這使得可以對機器人進行定制,以滿足其任務不斷變化的需求。
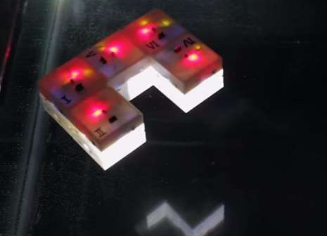
每個模塊都是一個立方體,并具有四個微型泵,可讓其在水中獨立移動。將模塊連接在一起時,它們可以相互吸收流體,也可以吸收環境流體。流體通過模塊網絡的路由會導致機器人移動。網絡中的模塊越多,機器人移動的精度就越高,并且它能夠更好地處理故障。這個新概念稱為模塊化液壓推進(MHP)。構造了一個MHP機器人的六個原型模塊,它們漂浮在水面上。
科學家將機器人設定為一項任務-檢測并移向光源。機器人無需中央大腦即可可靠地解決此任務。而是,每個模塊獨立地做出自己的決定,并且只需要一個字節的傳感器信息即可。
領導該團隊的自動控制和系統工程系的Roderich Gross博士說:“機器人技術的挑戰之一是使機器人足夠小,使其能夠穿越原本無法進入的狹窄空間。收縮機器人向下(可能達到亞毫米級),對硬件以及這些機器人可以處理多少信息施加了嚴格的限制。”
模塊化液壓推進可以為需要可重配置的系統在3D密閉空間中精確移動的問題提供新的解決方案,例如檢查地下水管道。將來,小型化的MHP機器人甚至可能會進入血管網絡,以監測患者的健康狀況或有針對性地輸送藥物。
來自自動控制和系統工程系的博士生Matthew Doyle一直在從事這個項目。他說:“像這樣的機器人的一種潛在用途是在水下環境中進行搜索和救援。在這種情況下,您可能不知道機器人需要提前適應各種情況。
“這些模塊可以分開,更快地搜尋幸存者,并重組以舉起重物并打開通道。
")


")


")



")
")
")
")
")
")
")
")
")