您現在的位置是:首頁 >要聞 > 2020-12-04 08:47:18 來源:
改進的機器人遠程控制如何
有時,您需要將人類的知識和技能帶到危險或難以接近的地方。名為“預測頭像控制和反饋(PACOF)”的項目正在創建一個機器人系統,使機器人操作員可以像機器人一樣體驗該位置。代表特溫特大學EEMCS系的三個不同學科的三位研究人員正在該項目中開展合作。
頭像
Douwe Dresscher博士,Felix Schwenninger博士和Gwenn Englebienne博士正在建造的“化身”有點像同名電影中的藍色人形生物。Dresscher說:“像這些虛構人物一樣,我們正在研究類似的控制系統,該系統將使操作員感覺自己已取代了機器人。”
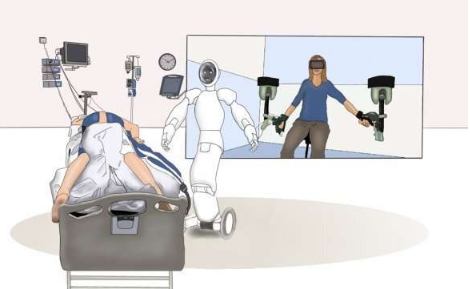
挪威已經在開發用于家庭護理的機器人,但是它們還沒有像現在這樣個性化。在這個人口稀少的國家,化身可以讓護理人員通過機器人看到患者并與患者互動,從而幫助彌合巨大的距離。這些化身還可用于危險工作,例如在鹿特丹港裝卸油輪。德萊舍說:“危險物質必須由具有適當專業知識的操作員來處理。使用化身,您就可以向油輪獲得必要的技能,而不必危害人員。”
這個怎么運作
要使其正常工作,必須發生三件事。首先,運營商必須與外界完全隔離。其次,他們必須經歷現實的刺激才能創建虛擬世界。Dresscher說:“這不僅意味著通過VR眼鏡投射的圖像和聲音,而且還包括氣味,溫度和當您推向物體時遇到的反壓之類的東西。” “我們希望操作員感到自己在其他地方;必須感覺到機器人是他或她自己的身體。” 最后,控件必須直觀,并且必須在化身中產生幾乎相同的動作。
延遲
在PACOF項目中,研究人員將專注于后者的挑戰。Dresscher說:“我們可以給操作員提供他們可以控制的機械臂,但是由于網絡的延遲,當操作員進行移動時,在復制機器人之前還會有一個延遲。” 同樣,機器人提供的反饋也需要一些時間才能到達操作員。這使得控制這樣的系統更加尷尬,從而限制了您可以使用該系統執行的操作。
預測未來
可以通過讓機器人預測操作員的工作來解決延遲問題。甚至可以在機器人從操作員接收信號之前對其進行建模以執行運動。“與此同時,我們還將嘗試預測機器人的環境將如何響應并將其整合到操作員的反饋中,這樣他們就不會注意到延遲。這也意味著我們必須考慮如果機器人做出反應會發生什么情況。錯誤的預測:機器人如何解決錯誤,操作員將需要什么樣的反饋?” 德萊徹說。
")


")


")



")
")
")
")
")
")
")
")
")