您現在的位置是:首頁 >教育 > 2020-12-04 09:28:43 來源:
由彈頭打造的變形機器人展示了新的運動策略
導讀 制造傳統的機器人通常需要仔細地組合諸如電動機,電池,致動器,車身分段,腿和車輪之類的組件。現在,研究人員采用了一種新方法,完全由小
制造傳統的機器人通常需要仔細地組合諸如電動機,電池,致動器,車身分段,腿和車輪之類的組件。現在,研究人員采用了一種新方法,完全由小型機器人(稱為“小物件”)制造機器人,以解鎖潛在的新運動技術的原理。
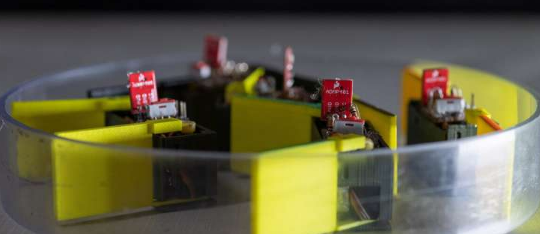
3D打印的smarticle(聰明的活性粒子的縮寫)只能做一件事:拍打兩只手臂。但是,當這些智能小球中的五個被限制在一個圓圈中時,它們開始彼此微動,形成一個稱為“超級智能”的機器人物理系統,它可以自行移動。添加光或聲音傳感器可以使超級智能響應刺激而移動,甚至可以控制得足夠好以迷宮導航。
盡管目前還很初級,但由較小的機器人制造機器人的概念(并利用通過合并個體而產生的組能力)可以對非常小的機器人提供基于機械的控制。最終,該小組的新興行為可以為可能改變形狀的小型機器人提供一種新的運動和控制方法。
佐治亞理工學院物理學院的鄧恩家族教授丹·高德曼說:“這些都是非常基本的機器人,其行為主要由力學和物理定律決定。” “我們不希望將復雜的控制,感測和計算全部應用于它們。隨著機器人變得越來越小,我們將不得不使用力學和物理原理來控制它們,因為它們將不具備計算和感測的水平。需要常規控制。”
這項研究得到了陸軍研究辦公室和美國國家科學基金會的支持,計劃于9月18日在《科學機器人》雜志上發表。西北大學的研究人員也對該項目做出了貢獻。
")









")
")
")
")
")
")
")
")
")