您現在的位置是:首頁 >動態 > 2020-12-03 09:40:43 來源:
Rebel機器人可幫助研究人員了解人機合作
布里斯托大學的計算機科學家開發了一種新的人類機器人研究方法,即手持機器人,該機器人首先進行預測,然后反叛用戶的計劃而使用戶感到沮喪,從而證明了對人類意圖的理解。在技??術日新月異的世界中,人與機器之間的合作是自動化的重要方面。這項新的研究表明,故意使人沮喪是開發與用戶更好協作的機器人過程的一部分。
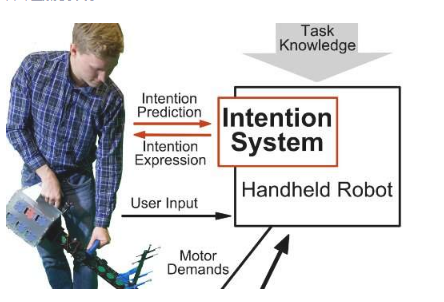
布里斯托爾(Bristol)的團隊已經開發出智能的手持式機器人,可以與用戶協作完成任務。與傳統的電動工具相反,該電動工具對其執行的任務一無所知,并且完全在用戶的控制之下,而手持機器人則擁有有關該任務的知識,并且可以通過指導,微調運動和有關任務序列的決策來提供幫助。
雖然這有助于更快,更準確地完成任務,但當機器人的決策與自己的計劃不符時,用戶可能會感到惱火。
博士在這個領域的最新研究。布里斯托大學計算機科學系的候選人Janis Stolzenwald和Walterio Mayol-Cuevas教授探索了智能工具的使用,這些工??具可以根據用戶的意愿來改變他們的決策。
這項研究是對人類機器人研究的一種新穎而有趣的轉折,它旨在首先預測用戶的需求,然后違背這些計劃。
Mayol-Cuevas教授說:“如果您對一臺旨在幫助您的機器感到沮喪,則比通常難以捉摸的人機合作信號更容易識別和衡量。如果用戶在我們指示機器人進行操作時感到沮喪反對他們的計劃,我們知道機器人知道他們想做什么。”
“就像對彼此行為的短期預測對于成功的人類團隊合作必不可少一樣,我們的研究表明,將這種能力集成到協作機器人系統中對于成功的人機協作至關重要。”
在這項研究中,研究人員使用了一個原型,該原型可以跟蹤用戶的視線,并通過機器學習獲得有關預期動作的短期預測。然后,這些知識將用作機器人決策(例如下一步移動)的基礎。
布里斯托(Bristol)團隊使用900多個訓練實例對機器人進行了研究培訓,這些實例來自參與者的拾放任務。
該研究的核心是意圖預測模型的評估。研究人員測試了兩種情況下的機器人:服從和叛逆。機器人被編程為遵循或違背用戶的預期意圖。知道用戶的目標使機器人有能力反抗他們的決定。兩種情況下挫折響應的差異證明了機器人預測的準確性,從而驗證了意圖預測模型。
Janis Stolzenwald,博士 由德國學術獎學金基金會和英國EPSRC贊助的學生進行了用戶實驗,并確定了未來的新挑戰。他說:“我們發現,將注視數據與任務知識相結合時,意圖模型會更有效。這提出了一個新的研究問題:機器人如何檢索該知識?我們可以想象從演示中學習或讓另一個人參與其中。任務。”
為了應對這一新挑戰,研究人員目前正在研究有關通過手持式機器人進行遠程協作的研究中的共享控制,交互和新應用。維護任務充當用戶實驗,在該實驗中,手持機器人用戶將通過遠程控制機器人的專家來獲得幫助。
該研究建立在前博士設計和制造的手持式機器人的基礎上。學生Austin Gregg-Smith,可以通過研究人員的網站www.handheldrobotics.org作為開放源代碼設計獲得。
")









")
")
")
")
")
")
")
")
")