您現在的位置是:首頁 >動態 > 2020-11-30 09:37:01 來源:
在四旋翼無人機中重建蝙蝠行為的仿真框架
近年來,世界各地的研究人員一直在嘗試開發可在機器人和機器中重現人類或動物行為的計算技術。例如,這包括人腦的結構和功能,蜂群的交流能力,特定魚類或兩棲動物的運動方式等。
在先前研究成果的基礎上,弗吉尼亞理工大學和馬里蘭大學的研究人員最近推出了一種仿真框架,該框架可用于在四旋翼無人機中重現蝙蝠的行為。這種模型是在arXiv上預先發表的一篇論文中提出的,它是由生物聲波感測專家RolfMüller,統計學家Wu Xiaowei和Zhu Hongxiao以及計算機科學家Pratap Tokekar(由美國國家科學基金會(NSF)資助)合作開發的)。
“我們的總體想法是制造能夠在復雜的自然環境中導航的同時重現蝙蝠行為的無人機”,朱told告訴TechXplore。“在這項特殊的研究中,我們的主要目標是建立一個計算框架,以模擬蝙蝠的感應環境,并產生用于訓練和測試目的的模擬生物聲納信號。”
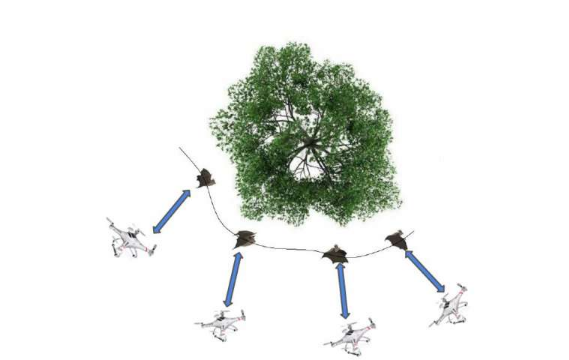
Zhu和她的同事們開發的模擬框架包括一個用樹木模擬隨機森林幾何形狀的模型和一個生成生物聲波信號的模型。生物聲納信號是蝙蝠和其他動物(包括鯨魚和海豚)產生的短音。這些聲音會產生回聲,其中包含有關周圍環境的有價值的信息,有助于動物的航行以及狩獵和覓食。
新框架的第一個組件是提供有關隨機環境的詳細信息的模型。第二個組件模仿了生物機制,該機制使蝙蝠可以進行生物聲納引導導航,并產生模擬回聲,其中包含有關機器人周圍環境的信息。
朱及其同事設計的模擬方法具有一些獨特的功能和優勢。最引人注目的之一是它允許隨機模擬重復運行,因此它可以產生豐富的感官數據,而使用更傳統的實驗方法則很難收集到這些數據。
這項研究的共同研究人員托克卡爾對TechXplore表示:“迄今為止,機器人技術的主要成功是在受限制的結構化環境中,例如倉庫和工業環境。” “在非結構化環境(例如森林和茂密的植被區)中使用無人機引起了很多興趣。僅舉兩個例子:DARPA最近完成了其快速,輕便,自主計劃,該計劃的重點是敏捷無人機在森林環境中運行,而陸軍研究實驗室宣布了一項新計劃,即SARA,其目標非常相似。”
根據托克卡(Tokekar)的觀點,自然界提供了無數的行為示例,這些行為如果被人工復制,將在機器人應用程序中非常有用。他們的研究重點是在蝙蝠中觀察到的生物聲納輔助導航能力,可以專門幫助增強飛行機器人的導航和物體檢測能力。
將來,Zhu,Tokekar及其同事開發的仿真平臺可用于在自主四旋翼無人機中復制這種特殊的蝙蝠行為。此外,它還可以幫助研究人員評估和比較模擬環境中蝙蝠啟發的不同導航算法。
“我們工作最有意義的方面是,它提供了一個方便的平臺,用于訓練和測試無人機用生物啟發式機器人算法,”朱說。“在接下來的研究中,我們計劃通過使用在此框架中生成的Biosonar數據來訓練和測試用于不同導航任務的機器人算法。”
")









")
")
")
")
")
")
")
")
")