您現在的位置是:首頁 >人工智能 > 2022-08-08 16:59:05 來源:
智能微型機器人通過人工智能學習如何游泳和導航
來自圣克拉拉大學、新澤西理工學院和大學的研究人員已經能夠通過深度強化學習成功地教微型機器人如何游泳,這標志著微型游泳能力的進步有了實質性的飛躍。
人們對開發能夠像細菌等自然存在的游泳微生物一樣在世界上航行的人造微型游泳者產生了極大的興趣。這種微型游泳者為大量未來的生物醫學應用提供了希望,例如靶向藥物輸送和顯微外科手術。然而,迄今為止,大多數人造微型游泳者只能以固定的運動步態進行相對簡單的機動。
在發表在通訊物理學上的研究人員的研究中,他們推斷微型游泳者可以通過人工智能學習并適應不斷變化的條件。就像人類學習游泳一樣,需要強化學習和反饋才能在不斷變化的條件下保持漂浮并朝各個方向推進,微型游泳者也必須如此,盡管它們在微觀世界中面臨著物理學所帶來的獨特挑戰。
圣克拉拉大學機械工程副教授OnShunPak說:“能夠獨自在微觀尺度上游泳是一項具有挑戰性的任務。”“當你想讓微型游泳者進行更復雜的動作時,他們的運動步態設計很快就會變得難以處理。”
通過將人工神經網絡與強化學習相結合,該團隊成功地教會了一個簡單的微型游泳者游泳并朝任意方向航行。當游泳者以某種方式移動時,它會收到有關特定動作有多好的反饋。然后,游泳者根據其與周圍環境互動的經驗逐步學習如何游泳。
“類似于人類學習如何游泳,微型游泳者學習如何移動其‘身體部位’——在這種情況下是三個微粒和可擴展的鏈接——以自行推進和轉動,”該大學機械工程助理教授AlanTsang說。大學。“它不依賴人類知識,而只依賴機器學習算法。”
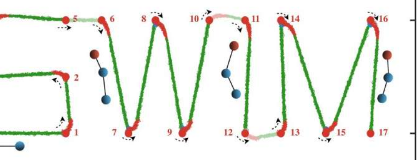
作為游泳者強大能力的證明,研究人員表明它可以在沒有明確編程的情況下遵循復雜的路徑。他們還展示了游泳者在外部流體流動引起的擾動下航行時的穩健表現。
新澤西理工學院數學科學教授Yuan-nanYoung說:“這是我們應對開發微型游泳者挑戰的第一步,這些微型游泳者可以像生物細胞一樣自主適應復雜環境。”
這種適應性行為對于人工微型游泳者在具有不受控制和不可預測的環境因素的復雜介質中的未來生物醫學應用至關重要。
“這項工作是如何利用人工智能的快速發展來解決流體動力學運動問題中未解決的挑戰的一個關鍵例子,”賓夕法尼亞大學微型機器人和生物物理學專家阿諾德·馬蒂森說,他沒有參與。在研究中。“這項工作中機器學習和微型游泳者之間的整合將激發這兩個高度活躍的研究領域之間的進一步聯系。”
")


")


")



")
")
")
")
")
")
")
")
")