您現在的位置是:首頁 >人工智能 > 2022-07-27 16:55:15 來源:
學習使用觸覺反饋來區分布料層
導讀 布料操作是機器人技術中一個具有挑戰性的研究領域。然而,目前的方法很多都集中在自上而下地抓住一塊布。這種抓握對于某些任務可能無效,例
布料操作是機器人技術中一個具有挑戰性的研究領域。然而,目前的方法很多都集中在自上而下地抓住一塊布。這種抓握對于某些任務可能無效,例如從一堆布料中挑選所需數量的層。
因此,arXiv.org最近的一篇論文探討了基于磁力計的觸覺傳感在可變形布料操作中的應用。特別是,研究人員專注于抓取和提升堆疊的布料層。
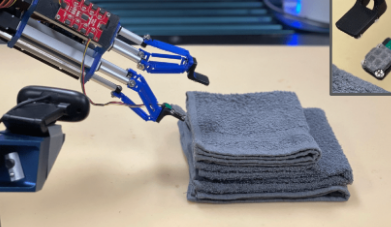
提出了一個由7自由度臂、夾具和夾具手指上的傳感器組成的機器人系統。研究人員介紹了一種訓練程序,其中觸覺分類器用作抓取策略的反饋。實驗結果表明,這些簡單的方法能夠成功地完成抓取所需數量的布料層的任務。
布匹機器人操作的應用范圍從織物制造到處理毯子和衣物。布料操作對機器人來說具有挑戰性,這主要是因為它們在折疊或皺褶配置中具有高自由度、復雜的動力學和嚴重的自閉塞。先前關于機器人操作布料的工作主要依賴于視覺傳感器,這可能對細粒度的操作任務構成挑戰,例如從一堆布料中抓取所需數量的布料層。在本文中,我們建議使用觸覺傳感進行布料操作;我們將觸覺傳感器(ReSkin)連接到Franka機器人的兩個指尖之一,并訓練分類器來確定機器人是否抓取特定數量的布料層。在測試時間的實驗中,機器人使用這個分類器作為其策略的一部分,使用觸覺反饋來抓取一層或兩層布料,以確定合適的抓取點。
")


")


")



")
")
")
")
")
")
")
")
")