您現在的位置是:首頁 >人工智能 > 2022-07-26 16:56:02 來源:
用于安全有效協作的新型移動機器人
移動機器人團隊可以非常有效地幫助人類完成繁重的手動任務,例如制造過程或重物的運輸。近年來,其中一些機器人已經在現實環境中進行了測試和引入,取得了非常有希望的結果。
西北大學機器人與生物系統中心的研究人員最近開發了新的協作移動機器人,稱為OmnidMocobots。這些機器人在arXiv上預先發表的一篇論文中進行了介紹,旨在相互合作并與人類合作,以安全地拾取、處理和運輸精致而靈活的有效載荷。
“機器人和生物系統中心在制造與人類進行物理協作的機器人方面有著悠久的歷史,”進行這項研究的研究人員之一馬修·埃爾文告訴TechXplore。“事實上,‘協作機器人’這個詞是在這里創造的。當前工作的靈感來自制造、倉庫和建筑任務,這些任務涉及操縱大型、鉸接或靈活的物體,在這些任務中,讓多個機器人支撐物體會很有幫助。”
多個移動機器人和人類用戶之間的協作可以具有幾個關鍵優勢。最值得注意的是,它將機器人的力量和精度與人類用戶的適應性和態勢感知相結合。
Elwin及其同事推出的新型機器人系統OmnidMocobot由一個移動底座和一個機械臂組成。該機器人具有三個重要特征,使其與其他機器人不同,使其特別適合與其他人類和OmnidMocobots密切協作來操縱物體。
“首先,機器人手臂具有內置的機械順應性,”Elwin解釋說。“這種‘柔軟性’意味著與典型的機器人手臂相比,機器人對人機交互更安全,并且不太可能損壞物體。第二,與大多數工業機器人手臂不同,機器人手臂的設計目的是精確控制抓手處的力。第三,控制移動基地和機械手的控制法則旨在允許Omnids團隊合作使大型物體對人類合作者失去重量。”
在他們的論文中,研究人員概述了設計和部署OmnidMocobot團隊的幾個重要考慮因素。此外,他們還分享了在現實環境中進行的幾項初步測試的結果。
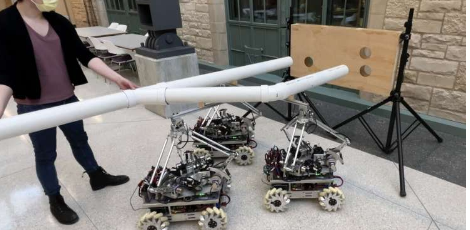
在最初的測試中,Elwin和他的同事評估了他們的機器人在與人類和其他機器人合作完成涉及操縱大型有效載荷的任務時的性能。他們發現,當與他們的三個機器人協作時,一個人類用戶能夠用一只手將一根15公斤的管道運輸并精確地組裝到一個固定裝置中。
與Mocobots的協作操作對人類用戶來說是直觀的,因此人類不需要培訓。Omnids也不必為具有不同類型有效負載的任務重新編程。
“在未來,我們設想由更強大的Mocobots組成的更大團隊,允許一個或少數人組裝大型結構,例如風力渦輪機上的葉片或火星棲息地的太陽能電池板,”Elwin說。“人類會召喚機器人來抓住物體,然后人類將指導組裝,而機器人提供幾乎所有所需的力量。”
埃爾文和他的同事們創造的新機器人很快就可以用來完成許多涉及人類的協作操作任務。機器人目前無法使用預編程控制器或通過觀察其人類合作者學習的策略自主操縱物體,因此這將是未來研究的目標。
研究人員現在還想測試機器人自主運輸和組裝不同物體的能力,包括易碎、鉸接和靈活的有效載荷。這將使他們能夠更好地了解可以部署機器人的環境。
“在我們的下一項工作中,我們還計劃納入更復雜的目標,例如允許人類移動物體,同時確保物體不會移動到受限區域或經歷可能破壞它的力量,”Elwin補充道。“此外,我們將使Omnids能夠學習有效載荷的運動學和慣性特性,并使用這些信息進行更靈巧的操作。”
")


")


")



")
")
")
")
")
")
")
")
")