您現在的位置是:首頁 >人工智能 > 2022-07-01 16:46:29 來源:
使用仿生人造皮膚模擬Ruffini受體的功能
移動機器人現在被引入到各種現實世界的環境中,包括公共場所、家庭環境、醫療保健設施和辦公室。其中許多機器人專門設計用于與人類互動和協作,幫助他們完成實際的體力任務。
為了提高移動機器人在交互式和手動任務上的性能,機器人專家需要確保他們能夠有效地感知環境中的刺激。近年來,許多工程師和材料科學家因此一直在嘗試開發可以人工復制生物感覺過程的系統。
ScuolaSuperioreSant'Anna、Ca'Foscari大學、羅馬Sapienza大學和其他研究所的研究人員最近使用了人造皮膚和深度學習技術,可用于提高現有和新開發的觸覺能力機器人復制所謂的魯菲尼受體的功能。他們在NatureMachineIntelligence上發表的一篇論文中介紹了他們的方法,它復制了位于人類真皮表層(即皮下皮膚組織)上的一類細胞的功能,即Ruffini受體。
Ruffini受體,也稱為Ruffini末端或小體,是一種小型且適應緩慢的細胞,可以檢測皮膚的拉伸,以及低頻振動、溫暖和壓力。它們是皮膚受體的四種主要類型之一,與默克爾細胞、帕西尼亞小體和邁斯納小體一起。
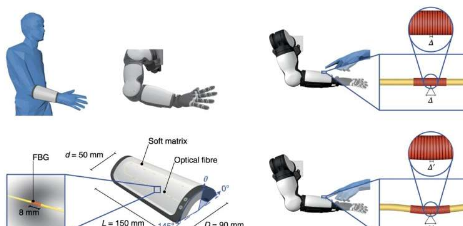
為了復制Ruffini末端的功能,研究人員使用了柔軟、彎曲的大面積人造皮膚,包括8毫米厚的可拉伸聚合物層,其中集成了430毫米長的光纖。人造皮膚是使用3D打印技術創建的。
“仿生皮膚由柔軟的聚合物基質組成,類似于人類前臂,嵌入了光子光纖布拉格光柵換能器,它部分地模仿了Ruffini機械感受器的功能,具有漫反射、重疊的感受野,”LucaMassari和他的同事在他們的論文中解釋道。
為了處理和理解他們創建的人造皮膚接收到的信號,研究人員開發了一種基于多層卷積神經網絡(CNN)的深度學習模型。該算法經過訓練以估計施加到人造皮膚表面的力并估計機器人接觸某物的點。
研究人員在他們的論文中寫道:“實施了基于CNN的深度學習算法和多網格神經元集成過程來解碼光纖布拉格光柵傳感器輸出,以推斷接觸力大小和通過皮膚表面的定位。”
研究人員在一系列模擬和測試中評估了他們的人造皮膚系統。他們發現它取得了非常有希望的結果,有效地預測了施加在人造皮膚上的力和施加位置。
研究人員寫道:“力和定位預測的中值誤差分別為35mN(四分位距56mN)和3.2mm(四分位距2.3mm)。”“具有擬人化手臂的演示為基于人工智能的集成皮膚鋪平了道路,從而通過機器智能實現安全的人機合作。”
未來,這組研究人員創建的系統可以在各種人形機器人上實施,因為構成皮膚的模塊化貼片理論上應該適合不同的架構和形狀。因此,在接下來的研究中,Massari和他的同事計劃測試他們的方法在多大程度上可以應用于其他系統。
")


")


")



")
")
")
")
")
")
")
")
")