您現在的位置是:首頁 >人工智能 > 2022-06-23 15:53:01 來源:
用于估計機械臂姿勢并預測其運動的深度學習框架
隨著機器人逐漸被引入各種現實世界環境,開發人員和機器人專家將需要確保它們可以安全地圍繞人類運行。近年來,他們引入了各種方法來實時估計位置和預測機器人的運動。
巴西伯南布哥聯邦大學的研究人員最近創建了一個新的深度學習模型來估計機械臂的姿勢并預測它們的運動。該模型在arXiv上預先發表的一篇論文中進行了介紹,專門用于提高機器人在與人類協作或交互時的安全性。
“出于預測人機交互(HRI)期間發生事故的需要,我們探索了一種框架,可以提高在機器人附近工作的人員的安全性,”進行這項研究的研究人員之一DjamelH.Sadok,告訴TechXplore。“姿態檢測被視為整體解決方案的重要組成部分。為此,我們提出了一種基于自校準卷積(SCConv)和極限學習機(ELM)的姿態檢測新架構。”
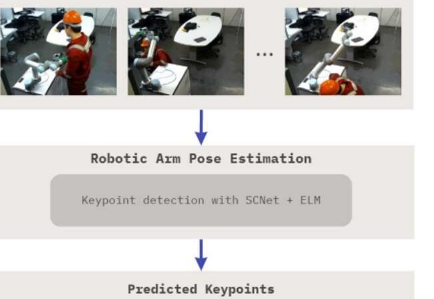
估計機器人的姿勢是預測其未來運動和意圖的重要步驟,進而降低它們與附近物體碰撞的風險。Sadok和他的同事介紹的姿勢估計和運動預測方法有兩個關鍵組件,即SCConv和ELM模型。
SCConvs組件改進了他們模型的整體空間和通道依賴性。另一方面,眾所周知,ELM方法是一種有效的數據分類方法。
“我們觀察到,在我們的應用程序中,沒有將這兩種技術結合起來的現有研究,”Sadok解釋說。“因此,我們決定看看這種組合是否能改善我們的應用。我們還通過應用運動預測、考慮姿勢檢測、使用遞歸神經網絡(RNN)來改進框架。”
首先,Sodok和他的同事編譯了一個自定義數據集,其中包含機械臂與附近人類用戶交互的場景圖像。為了創建這些圖像,他們專門使用了由UniversalRobots制造的機械臂UR-5。
研究人員對這些圖像進行了注釋,尤其是機械臂的框架。然后,這使他們能夠使用新數據集來訓練SCNet,這是他們框架的基于SCConv的組件。
“與其他已知架構(例如VGG或ResNet)相比,我們的目標是改善觀察到的錯誤,”Sadok說。“為了提取特征,我們使用SCNet并在網絡末端應用EML。接下來我們使用長短期記憶(LSTM)算法和門控循環單元(GRU)來預測運動。我們認為這是一種新方法解決這個問題。”
Sadok和他的同事在一系列初始測試中評估了他們的框架的性能,他們試圖估計姿勢并預測UR-5手臂的未來運動,因為它正在幫助人類用戶完成與維護相關的任務。他們發現它取得了非常有希望的結果,檢測機械臂的姿勢并以良好的準確度預測其未來的運動。
“我們相信我們的主要貢獻是生成了一個能夠檢測機械臂姿勢及其運動的框架,從而提高了手臂的安全性,”Sadok說。“我們還擴展了SSConv和EML的適用性,并驗證了它們的組合能力。”
將來,這組研究人員開發的框架可用于提高現有和新開發的機器人系統的安全性。此外,他們使用的SCConv和ELM算法可以適應并應用于其他任務,例如人體姿態估計、對象檢測和對象分類。
“我們現在計劃將我們的框架擴展到人體姿勢檢測,并共同提供機器人和姿勢估計,”Sadok補充道。“通過結合這兩種數據,我們可以對兩種運動進行聯合預測,從而防止它們在工廠中的相互作用產生的進一步風險,并更好地對風險等級進行分類。”
")


")


")



")
")
")
")
")
")
")
")
")