您現在的位置是:首頁 >人工智能 > 2022-05-18 15:45:35 來源:
一種更安全地控制移動機械臂的新方法
上海交通大學、牛津大學和騰訊機器人 X 實驗室的研究人員最近推出了一種配置感知策略,用于安全控制移動機械臂。這項政策是在 arXiv 上預先發表的一篇論文中介紹的,它可以幫助更好地引導機械臂的運動,同時還可以降低它與附近物體和其他障礙物發生碰撞的風險。
“本文的準備工作包括已完成的移動機械臂基于視覺的抓取工作,以及通過在模擬中對移動機械臂進行建模實現的避障工作,”進行該研究的研究人員之一范丁告訴 TechXplore . “本文的主要目標是利用構建的移動機械手系統來驗證我們提出的安全控制理論。”
Ding 和他的同事介紹的新定律旨在將移動機械臂驅動到太空中的所需區域,同時防止它與附近的物體或障礙物發生碰撞。該團隊專門制定了這項法律,希望它能提高在障礙物聚集環境中運行的機器人的性能和安全性。
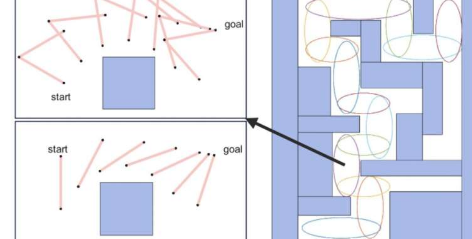
與過去引入的其他方法和政策相比,最近的論文中概述的方法還描述了移動機械臂的空間結構。這最終使研究人員能夠更有效地防止與附近物體的碰撞。
“本文中的配置感知部分實現了抓取物體的任務,而對于避障任務,我們將這部分設置為先驗知識,不進行探索,”丁解釋說。“移動機械臂的安全控制是通過實時安全控制律來實現的,它是通過求解一個包含有限個控制障礙函數約束的二次程序得到的,它結合了移動機械臂的空間結構。整體計算機械臂控制器的效率不會隨著空間結構復雜性的增加而大大降低。”
到目前為止,丁和他的同事在一系列數值模擬中評估了他們的方法。他們的發現非常有希望,表明他們的新政策可以幫助提高他們應用的移動機械臂的安全性和效率。
“最顯著的成就是提出了一種在線移動機械臂避障方法,該方法考慮了移動機械臂的空間結構,并具有良好的維度縮放,”丁說。“它可能產生的影響是為高自由度移動機器人提出一種可行的解決方案,以有效地避開障礙物。”
未來,研究人員希望在真實的物理機械臂中實施和評估他們的方法,以進一步確認其有效性。此外,他們的工作可能會激發類似方法的開發,以降低機器人與周圍障礙物碰撞的風險。
“未來,配置感知部分將應用于移動機械臂的避障,而不是使用環境作為先驗知識,”丁補充說。“此外,他們計劃探索移動基地的常規規劃。”
")


")


")



")
")
")
")
")
")
")
")
")