您現在的位置是:首頁 >人工智能 > 2021-05-06 05:29:37 來源:
四足機器人隨著速度逐步發生自發變化
導讀 東北大學的Akio Ishiguro教授和助理教授Dai Owaki首次成功地證明,通過僅改變與速度相關的參數,四足機器人可以自發地改變其在節能模式之
東北大學的Akio Ishiguro教授和助理教授Dai Owaki首次成功地證明,通過僅改變與速度相關的參數,四足機器人可以自發地改變其在節能模式之間的步伐(步態過渡)現象)。
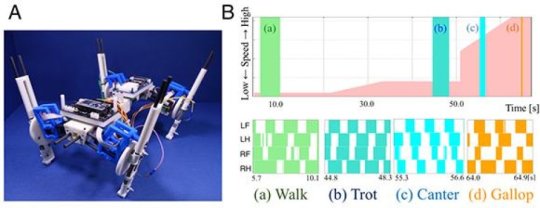
到目前為止,改變速度導致四足動物改變步態的方式 - 走路,小跑和奔跑 - 卻知之甚少。通過這項研究,研究人員成功地證明了四足動物步態過渡現象的再現。他們通過分散控制方案實現了這一點,使用簡單的局部規則,其中腿部繼續支撐身體,同時感知相應腿部的重量。
此外,他們證實了機器人步態模式的能效曲線與馬匹測量的能量曲線相匹配。
目前的工作有望更好地理解四足動物在速度變化時如何靈活有效地調整步態的機制。該結果可構成協調自適應機器人運動所需的許多自由度的非常規方法的基礎。
研究人員希望這項研究能夠帶來廣泛的應用,例如在災區工作的自適應腿式機器人,用戶友好的腿式娛樂機器人,以及用于計算機圖形(CG)動畫的自動運動創建算法。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")