您現在的位置是:首頁 >人工智能 > 2021-05-03 22:02:20 來源:
生物靈感的眼睛穩定了機器人的飛行
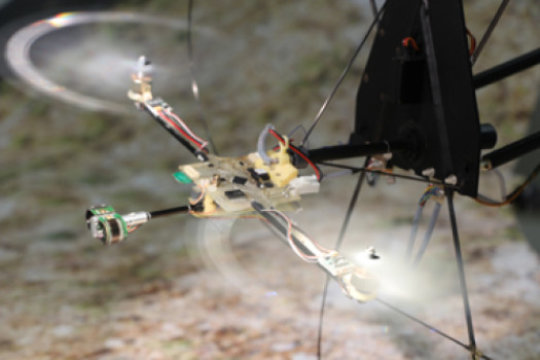
位于Etienne-Jules Marey的科學研究所(CNRS / Aix-MarseilleUniversité)的Biorobotics研究人員開發出了第一個能夠在不平坦地形上飛行的航空機器人,這種機器人在沒有加速度計的情況下在視覺上穩定。它被稱為BeeRotor,它可以通過受昆蟲視覺啟發的光學流量傳感器調節速度并避開障礙物。它可以沿著隧道飛行,不均勻的移動墻壁,無需測量速度或高度。
從無人機到阿麗亞娜發射器的所有飛機目前都配備了慣性測量裝置,包括加速度計。這使得這些飛機能夠相對于地平線或相對于其垂直方向穩定它們的滾轉和俯仰:地球中心的方向。加速度計測量飛機的所有加速度,包括重力,其總是指向地球的中心。然而,這個必不可少的工具在昆蟲中沒有等同物,如果沒有這些信息,它們會非常幸福
因此,研究人員Fabien Expert和Franck Ruffier從有翼昆蟲中汲取靈感,創造了BeeRotor,這是一種系留飛行機器人1,它首次能夠調整速度,無需加速度計即可跟蹤地形,無需測量速度或高度。它的重量為80克,長度為47厘米,它可以單獨避開帶有移動墻的隧道中的垂直障礙物。為了實現這一目標,研究人員模仿了昆蟲在飛行時使用過往景觀的能力。這被稱為光流,在沿高速公路行駛時可以很容易地觀察到其原理:前方的視野相當穩定,但從兩側向外看,景觀越過越快,以一定角度達到最大值與車輛的路徑成90度。
為了測量光學流量,BeeRotor配備了僅在其眼睛頂部和底部分布的24個光電二極管(或像素)。這使它能夠檢測環境中的對比度以及它們的運動。與昆蟲一樣,風景中的特征從一個像素移動到另一個像素的速度提供了流動的角速度。當流量增加時,這意味著機器人的速度也在增加,或者相對于障礙物的距離正在減小。
通過大腦,BeeRotor有三個反饋回路2,它們作為三種不同的反射,直接利用光流。第一個反饋回路使其改變其高度,以便跟隨地板或屋頂。第二個控制機器人的速度,以使其適應它飛過的隧道的大小。第三個環路使用專用電機使眼睛相對于局部斜率穩定。這使得機器人能夠始終獲得最佳視野,而與其俯仰程度無關。因此,BeeRotor可以避免非常陡峭的障礙,沒有加速度計,也沒有測量速度或高度。2013年底,該技術獲得了專利。
有了BeeRotor,因此有可能提出一個新的,生物學合理的假設來解釋昆蟲如何在沒有加速度計的情況下飛行:由于類似于機器人使用的反饋回路,有翼昆蟲可以使用來自光流的提示保持穩定。
這個世界首先也有工業應用。加速度計以及包含它們的慣性參考系統3對于非常小的機器人而言太重且太笨重。質量約為1克,它們不適用于重約10克的機器人,例如可用于檢查管道。航天工業也需要輕盈,每公斤送入太空需要相當大的成本。在不必替換加速度計的情況下,光學流量傳感器可用作太空任務4發生故障時的超輕型備用系統。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")