您現在的位置是:首頁 >人工智能 > 2021-05-03 20:56:49 來源:
飛行和駕駛的四軸飛行器系統提出了另一種開發飛行汽車的方法
能夠步行和乘坐飛行是典型的自然 - 許多鳥類,昆蟲和其他動物可以做到這兩點。如果我們可以對具有類似多功能性的機器人進行編程,它將開辟許多可能性:想象一下機器可以飛入建筑區域或不靠近道路的災區,然后擠過地面上的狹小空間來運輸物體或救援人員。
問題是,擅長一種運輸方式的機器人通常對另一種運輸方式不好。機載無人機速度快,靈活,但通常電池壽命太短,無法長途旅行。另一方面,地面車輛更節能,但速度更慢,移動性更低。
麻省理工學院計算機科學與人工智能實驗室(CSAIL)的研究人員的目標是開發能夠在陸地上進行機動并帶到天空的機器人。在一篇新論文中,該團隊展示了一個由八個四軸飛行器無人機組成的系統,它可以飛行并穿過類似城市的環境,包括停車位,禁飛區和著陸墊。
該論文的第一作者,博士生Brandon Araki說,飛行和駕駛的能力在有很多障礙的環境中很有用,因為你可以飛越地面障礙物并在頭頂障礙物下行駛。普通無人機根本無法在地面上操縱。帶輪子的無人機更具移動性,同時飛行時間略有減少。
Araki和CSAIL主任Daniela Rus與麻省理工學院的本科學生John Strang,Sarah Pohorecky和Celine Qiu以及蘇黎世聯邦理工學院高級互動技術實驗室的Tobias Naegeli一起開發了該系統。該團隊于本月早些時候在新加坡舉行的IEEE國際機器人與自動化會議(ICRA)上展示了他們的系統。
這個怎么運作
該項目建立在Araki先前開發的飛猴機器人的基礎上,該機器人可以爬行,抓取和飛行。雖然猴子機器人可以跳過障礙物并爬行,但仍然無法自主旅行。
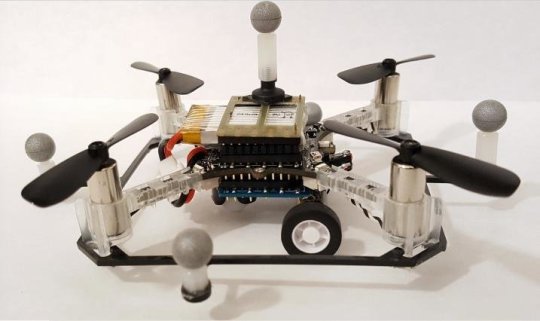
為了解決這個問題,該團隊開發了各種路徑規劃算法,旨在確保無人機不會發生碰撞。為了使它們能夠駕駛,該團隊在每架無人機的底部放置了兩個帶輪子的小型電動機。在模擬中,機器人可以在電池耗盡之前飛行90米或行駛252米。
將驅動組件添加到無人機中會略微縮短其電池壽命,這意味著它可以飛行的最大距離減少了14%到大約300英尺。但由于駕駛仍然比飛行更有效,因此駕駛效率的提高超過了由于額外重量而導致飛行效率相對較小的損失。
Rutgers大學的計算機科學教授Jingjin Yu表示,這項工作為大規模混合模式運輸提供了一種算法解決方案,并顯示其對現實世界問題的適用性。
該團隊還使用日常材料測試系統,例如道路用布料和建筑物紙板箱。他們測試了8個機器人在無碰撞路徑上從起點導航到終點,并且都成功了。
羅斯表示,像他們這樣的系統表明,制造安全有效的飛行汽車的另一種方法不是簡單地在汽車上放置機翼,而是建立多年來為無人機增加駕駛能力的研究。
Rus說,隨著我們開始為飛行汽車開發規劃和控制算法,我們對能夠以小規模創造具有這些功能的機器人的能力感到鼓舞。雖然擴大到可以實際運輸人類的車輛顯然仍然面臨巨大的挑戰,但我們的靈感來自未來的潛力,飛行汽車可以為我們提供快速,無交通的運輸。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")