您現在的位置是:首頁 >人工智能 > 2021-04-28 00:03:11 來源:
機器人可以在幾分鐘內自動恢復損壞
有朝一日,機器人將為社會提供巨大的利益,例如在搜救任務和撲救森林火災中 - 但直到他們能夠學會在受到損害時繼續工作。
“ 自然 ” 雜志上發表的一篇名為“能夠像動物一樣適應的機器人” 的新論文展示了如何讓機器人在不到兩分鐘的時間內自動恢復受傷。
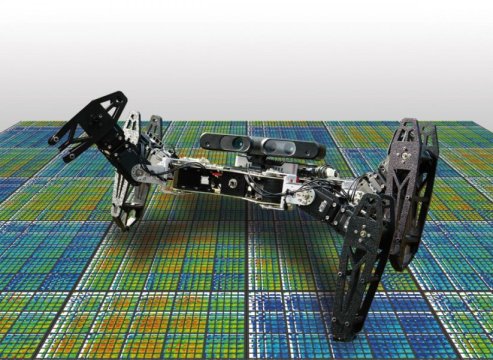
該作品的視頻顯示了一個六足機器人,即使兩條腿斷了也能適應繼續行走。它還顯示了一個機器人手臂,它學會了如何正確放置一個物體,即使有幾個損壞的電機。
來自法國皮埃爾和瑪麗居里大學的Antoine Cully和Jean-Baptiste Mouret與Jeff Clune(懷俄明大學)和Danesh Tarapore(皮埃爾和瑪麗居里大學)合作領導了這項工作。
與今天的機器人相比,動物表現出驚人的適應傷害的能力。例如,有很多三條腿的狗可以捕捉飛盤,如果你的腳踝被扭傷,你很快就會找到一條走路,盡管受傷了。科學家從這些生物學策略中汲取靈感。
“受傷時,動物不會從頭開始學習,”資深作家讓 - 巴蒂斯特·穆雷說。“相反,他們對不同的行為方式有直覺。這些直覺允許他們智能地選擇一些不同的行為進行嘗試,并且在這些測試之后,他們選擇一種盡管受傷但仍可以工作的機器人。我們制造了可以做的機器人相同。”
在部署之前,機器人使用自身的計算機模擬來創建高性能行為空間的詳細地圖。該圖表示機器人對其可以執行的不同行為及其預測值的“直覺”。如果機器人受損,它會使用這些直覺來指導學習算法,該算法進行實驗以快速發現盡管受到損害仍然有效的補償行為。新算法稱為“智能試驗和錯誤”。
“一旦受損,機器人就像一個科學家,”主要作者Antoine Cully解釋道。“它對可能有效的不同行為有先前的期望,并開始測試它們。但是,這些預測來自模擬的,未損壞的機器人。它必須找出它們中的哪些工作,不僅在現實中,而且還有損壞。
“它嘗試的每個行為就像一個實驗,如果一個行為不起作用,那么機器人就足夠聰明,可以排除整個行為類型并嘗試一種新類型,”Cully繼續道。“例如,如果走路,主要是在后腿上,不能很好地行走,接下來會嘗試在前腿上行走。令人驚訝的是,它能以多快的速度學習一種新的行走方式。觀看機器人走路真是太棒了從大約兩分鐘的殘疾和鞭打到有效跛行。“
相同的智能試驗和錯誤算法允許機器人適應不可預見的情況,包括適應新環境和發明新行為。
Jeff Clune解釋說,“從技術上講,智能試驗和錯誤涉及兩個步驟:(1)創建行為 - 性能圖,(2)適應不可預見的情況。”
第一步中的地圖是使用一種稱為MAP-Elites的新型進化算法創建的。進化算法通過在計算機模擬中舉辦“適者生存”競賽來模擬達爾文進化,以演化人工智能機器人。第二步中的自適應涉及“貝葉斯優化”算法,該算法利用由地圖提供的先驗知識來有效地搜索盡管有損壞但仍然有效的行為。
“我們進行的實驗表明,智能試驗和錯誤的最重要組成部分是創建和利用地圖中包含的先驗知識,”Clune說。
這項新技術將有助于開發更強大,更有效的自主機器人。Danesh Tarapore提供了一些例子。
“它可以創造機器人,可以幫助救援人員,而不需要他們的持續關注,”他說。“這也使得創建個人機器人助手變得更加容易,即使部件壞了也可以繼續提供幫助。”
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")