您現在的位置是:首頁 >人工智能 > 2021-04-27 12:19:45 來源:
讓機器人更靈活掌握
工廠車間的大多數機器人都是手工制作的:配備大鉗子或爪子,它們設計用于執行簡單的操作,例如抓取物體,并將其放置在裝配線的其他位置。對于許多工業機器人來說,更復雜的運動,例如調整物體的抓地力,仍然遙不可及。
麻省理工學院的工程師現在已經找到了一種方法,可以為簡單的機器人抓手提供更多的靈活性:將環境作為幫助之手。由機械工程助理教授Alberto Rodriguez和研究生Nikhil Chavan-Dafle領導的團隊開發了一個模型,該模型預測機器人抓手需要用力推動環境中的各種固定裝置以調整其力量。抓住一個物體。
例如,如果機器人抓手的目的是在其中點拾取鉛筆,而是抓住橡皮擦端,則可以利用環境來調整其抓握。Rodriguez的模型不是釋放鉛筆而是再次嘗試,而是讓機器人稍微松開它的手柄,將鉛筆推到附近的墻上,足以讓機器人的抓手更靠近鉛筆的中點。
將機器人與環境相結合以提高靈活性是羅德里格斯稱之為“外在靈巧”的一種方法 - 而不是人類之手的內在靈活性。為了以類似的方式調整一個人對鉛筆的抓地力,一個人用一只手就可以簡單地用手指朝著鉛筆的中心爬行。但是在機器人手中編程這種內在的靈活性是非常棘手的,顯著提高了機器人的成本。
借助羅德里格斯的新方法,制造,醫藥,災難響應和其他基于抓手的應用中的現有機器人可以以經濟有效的方式與環境相互作用,以執行更復雜的操作。
羅德里格茲說:“追逐人手仍是一個非常有效的方向[機器人技術]。” “但是,如果你買不起10萬美元的手牌是非常復雜的,那么這種[方法]會給非常簡單的抓手帶來靈活性。”
Rodriguez和Chavan-Dafle將于9月份在智能機器人和系統國際會議上發表一篇詳細介紹其新方法的論文。
推動機器人技術發展
羅德里格斯目前正在探索多種方式,在這種方式中可以利用環境來提高簡單機器人抓手的靈活性。在正在進行的工作中,他的團隊正在尋找機器人可能使用重力來拋擲和捕捉物體的方式,以及像桌面這樣的表面如何幫助機器人在其手指之間滾動物體。
在這篇最近的論文中,該小組研究了一種外在靈活性的方法,稱為“適應性推動” - 利用環境中的固定裝置來操縱被抓物體。
羅德里格斯解釋說:“我們將你手中沒有的靈巧性外包給環境和手臂。” “而不是手上固有的靈巧,它是外在的,在環境中。”
研究人員開發了一個模型,描述了夾子,抓物體和不同類型的外部固定裝置(如角落,邊緣或表面)之間的強力相互作用。為了預測一個物體如何在一個夾具將其推向給定夾具時如何移動,研究人員設計該模型時要考慮各種因素,包括夾具和物體之間以及物體和環境之間的摩擦力。作為物體的質量,慣性和形狀。
“開發環境”
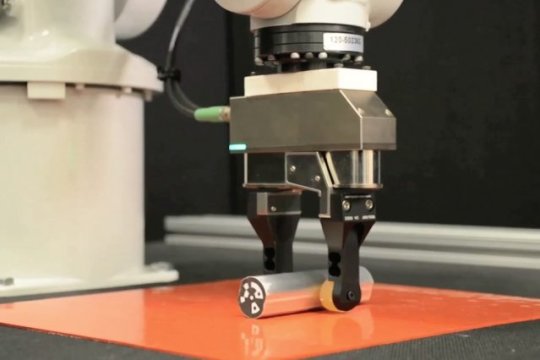
在其當前的迭代中,模型預測夾具必須施加在物體和環境上的力,以將物體操縱到期望的方向。例如,機器人如何緊握桿,以及將桿推到一個點上有多難,將桿旋轉45度?
Rodriguez和Chavan-Dafle測試了該模型對實際實驗的預測,使用一個簡單的雙指夾具來操縱一根短桿,無論是滾動,旋轉還是將其滑向三個固定裝置:一個點,一條線和一個平面。該團隊測量了機器人施加的力以將桿操縱到所需的方向,并將實驗力與模型的預測力進行了比較。
羅德里格茲說:“協議非常好。” “我們已經驗證了模型。現在我們正在規劃方面,看看如何規劃運動以產生某些軌跡。我們將來要問的一件事是:你如何在環境中設計固定裝置這樣機器人的動作更可靠,并且可以更快地執行?“
最終,羅德里格斯認為外在靈活性是一種廉價的方法,可以使簡單的機器人更靈活地用于各種用途:手術機器人可以將手術刀推到手術臺上以調整其抓地力,而現場的法醫機器人可能會對一塊反對附近巖石的證據,以更好地檢查它。
羅德里格茲說:“利用環境對機器人和研究界來說非常重要。” “任何你在有效載荷或成本或復雜性,制造,手術,野外作業,甚至太空探索等領域都有局限性的應用 - 只要你有一個像人手一樣不靈巧的抓手,這個[方法]給你一些靈巧。“
")









")
")
")
")
")
")
")
")
")