您現在的位置是:首頁 >人工智能 > 2021-04-24 07:21:03 來源:
模塊化機器人可以感知周圍環境做出決策并自主地采用不同的形狀來執行各種任務
導讀 通用機器人有很多限制。它們既昂貴又笨重。他們通常只完成一種類型的任務。
但是模塊化機器人 - 由幾個可互換的部件或模塊組成 - 更加
通用機器人有很多限制。它們既昂貴又笨重。他們通常只完成一種類型的任務。
但是模塊化機器人 - 由幾個可互換的部件或模塊組成 - 更加靈活。如果一個部件損壞,可以將其拆下并更換。組件可以根據需要重新排列 - 或者更好的是,機器人可以根據他們分配的任務和他們導航的環境找出如何重新配置??自己。
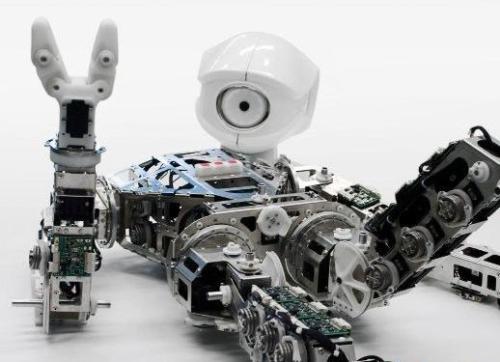
現在,康奈爾大學領導的團隊開發了模塊化機器人,可以感知周圍環境,做出決策并自主地采用不同的形狀來執行各種任務 - 這一成就使自適應多功能機器人的愿景更接近現實。
康奈爾大學機械與航空航天工程副教授兼該項目首席研究員Hadas Kress-Gazit說:“這是模塊化機器人第一次被證明具有自主重新配置和感知驅動的行為。”
這項研究的結果發表在Science Robotics上。
機器人由輪式立方體模塊組成,可以分離和重新連接以形成具有不同功能的新形狀。這些模塊具有相互連接的磁鐵,以及與集中式系統通信的Wi-Fi。
其他模塊化機器人系統已成功地在受控環境中執行特定任務,但這些機器人是第一個基于任務和不熟悉的環境展示完全自主行為和重新配置的機器人,Kress-Gazit說。
“我想告訴機器人它應該做什么,它的目標是什么,但不是應該怎么做,”她說。“我實際上沒有開處方,'向左移動,改變你的形狀。' 所有這些決定都是由機器人自主決定的。“
這項工作由國家科學基金會資助。
")









")
")
")
")
")
")
")
")
")