您現在的位置是:首頁 >要聞 > 2020-12-21 08:32:09 來源:
施工現場機器人隨著工具的下降計劃的變化而適應
導讀 為建筑工地設計的機器人是本周新聞。即,有一個稱為原位制造器的機器人。被描述為自主的建筑機器人,人們可以強調自主。IF代表了設計用于建
為建筑工地設計的機器人是本周新聞。即,有一個稱為原位制造器的機器人。被描述為自主的建筑機器人,人們可以強調自主。
IF代表了設計用于建筑的機器人技術的重要一步。簡而言之,它們被設計為更智能。它們不僅僅是像工廠一樣的機器,它們可以站在一起并將物體成堆放置,但經過精心設計,可以四處移動并適應不斷變化的情況。
來自路透社的吉姆·德魯里(Jim Drury)的詳細報告集中在瑞士國家研究能力中心(NCCR)數字加工中心的工程師們的想法上。該中心位于蘇黎世聯邦理工學院>校園。
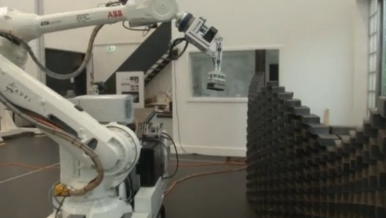
NCCR主任Matthias Kohler教授說,這是第一臺真正可以在建筑工地上進行非標準設計的機器。他提到的設計會根據建筑現場的不同而變化。
在預編程的結構中放置磚塊并不是其主要功能。傳感器和機載計算可幫助其建立3D站點地圖。它具有2D激光測距儀,可與構成地圖的計算機算法結合使用。
蘇黎世聯邦理工學院的喬納斯·布赫利(Jonas Buchli)教授說,船上裝有兩臺計算機,一臺用于手臂,一臺用于整個機器人。計算機為機器人移動并知道它在哪里計算信息。這就意味著機器人可以在沒有幫助的地方四處移動。他們可以自行適應較小的設計變化。
機器人可以適應計劃外的情況-放棄建造者的工具,后來進行設計變更。負責這項研究的喬納斯·布赫利(Jonas Buchli)教授對路透社說,研究中的機器人專家發現建筑工地有趣的環境,“介于工廠或實驗室完全規劃和控制的環境,以及戶外完全混亂的環境之間”。
Buchli說,這是一種半結構化的環境,研究人員可以測試和開發機器人在這種環境中移動并做有用的事情所需的技術。
")





")
")
")
")
")
")
")
")
")
")