您現在的位置是:首頁 >要聞 > 2020-12-18 08:33:26 來源:
快速的碰撞檢測器可以使機器人成為更好的人類助手
加利福尼亞大學圣地亞哥分校的電氣工程師已經開發了一種更快的碰撞檢測算法,該算法使用機器學習來幫助機器人避免移動物體并實時穿越復雜,快速變化的環境。該算法被稱為“ Fastron”,其運行速度比現有的碰撞檢測算法快8倍。
由電氣和計算機工程學教授,圣地亞哥加州大學情境機器人研究所成員Michael Yip領導的一組工程師團隊將于11月13日至15日在Google總部舉行的第一屆年度機器人學習大會上展示該新算法。該會議將頂級機器學習科學家帶到了僅邀請活動中。Yip的團隊將在為期3天的會議中發表長話之一。
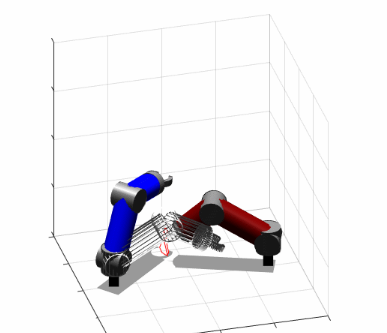
該團隊設想,Fastron對于在人類環境中運行的機器人必須具有廣泛的用途,在人類環境中,他們必須能夠流暢地移動物體和人員。它們以特定的探索的一個應用是機器人-assisted手術使用達芬奇手術系統,其中,機器人臂將自主地執行輔助任務(吸入,灌溉或將組織拉回來),而不在外科醫生控制的臂的方式獲得或患者的器官。
Yip說:“該算法可以幫助機器人助手以安全的方式進行手術合作。”
該團隊還預見到,Fastron可以用于在家中輔助生活應用的機器人,以及用于游戲和電影業的計算機圖形學,其中碰撞檢查通常是大多數算法的瓶頸。
現有的碰撞檢測算法的問題在于它們的計算量很大。他們花費大量時間指定給定空間中的所有點(機器人的特定3D幾何形狀和障礙物),并對每個點進行碰撞檢查以確定在給定時間是否有兩個物體相交。當障礙物移動時,對計算的要求更高。
為了減輕計算量,Yip和他的團隊在圣地亞哥加州大學的高級機器人與控制實驗室(ARClab)中開發了一種用于碰撞檢測的簡約方法。結果就是Fastron,該算法使用機器學習策略(該算法通常用于對對象進行分類)對動態環境中的碰撞與非碰撞進行分類。電氣工程博士Nikhil Das表示:“實際上,我們不需要了解所有特定的幾何形狀和點。我們只需要知道機器人的當前位置是否在碰撞中即可。” 葉氏小組的學生,也是該研究的第一作者。
")


")


")



")
")
")
")
")
")
")
")
")