您現在的位置是:首頁 >要聞 > 2020-12-17 14:28:44 來源:
工程師對微型機器人進行編程以使其移動
盡管工程師們已經成功地構建了類似昆蟲的微型機器人,但對其進行編程以使其像真正的昆蟲一樣自主運行,仍然給技術挑戰帶來挑戰。康奈爾大學的一組工程師一直在嘗試一種新型的程序設計,該程序模仿昆蟲的大腦工作方式,這很快就會使人們想知道墻上的蒼蠅是否真的是蒼蠅。
機器人感測一陣風所需的計算機處理能力,是使用嵌入在其機翼上的細小如頭發的金屬探針,相應地調整其飛行,并在嘗試著落在搖曳的花朵上時計劃其路徑,這需要它在其背面攜帶臺式計算機。機械和航空航天工程學教授,智能系統與控制實驗室主任西爾維亞·法拉利(Silvia Ferrari)將神經形態計算機芯片的出現視為縮小機器人有效載荷的一種方法。
與處理將0和1的組合作為二進制代碼的傳統芯片不同,神經形態芯片處理以復雜組合觸發的電流尖峰,類似于神經元在大腦內部的觸發方式。法拉利實驗室正在開發一種新型的“基于事件”的傳感和控制算法,該算法可模仿神經活動,并可在神經形態芯片上實現。由于這些芯片所需的功率比傳統處理器要少得多,因此它們允許工程師將更多的計算打包到相同的有效負載中。
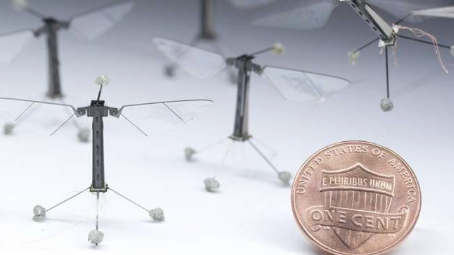
法拉利的實驗室與哈佛大學的微型機器人實驗室合作,后者開發了80毫克的飛行RoboBee,配備了多個視覺,光流和運動傳感器。雖然機器人目前仍被束縛在電源上,但哈佛研究人員正在努力消除對新電源開發的束縛。康奈爾算法將幫助RoboBee變得更加自主,并在不顯著增加其重量的情況下適應復雜的環境。
“受到陣風或旋轉門的撞擊會導致這些小型機器人失去控制。我們正在開發傳感器和算法,以使RoboBee避免墜毀,或者即使墜毀也能幸免并仍然飛行,”法拉利說。“您不能真正依靠機器人的先前建模來完成此操作,因此我們希望開發可適應任何情況的學習控制器。”
為了加快基于事件的算法的開發,法拉利實驗室的博士生Taylor Clawson創建了一個虛擬模擬器。基于物理的模擬器對RoboBee及其在每個機翼沖程期間所面臨的瞬時空氣動力進行建模。結果,該模型可以準確預測RoboBee在復雜環境中飛行期間的運動。
克勞森說:“仿真既用于測試算法,又用于設計算法。”他成功地利用了受生物學啟發的程序作為神經網絡,為機器人開發了自主飛行控制器。“該網絡能夠實時學習以解決制造過程中引入的機器人中的不規則性,這使機器人的控制難度大大增加。”
除了具有更大的自主性和靈活性之外,法拉利還表示,她的實驗室計劃幫助RoboBee配備新的微型設備,例如照相機,擴展的觸覺反饋天線,機器人腳上的接觸傳感器以及看起來像細小頭發的氣流傳感器。
“我們將RoboBee用作基準機器人,因為它具有很大的挑戰性,但是我們認為已經不受束縛的其他機器人將從這項發展中受益匪淺,因為它們在功率方面存在相同的問題,”法拉利說。
一個已經從中受益的機器人是哈佛微型機器人,這是一種四足機器,長17毫米,重量不到3克。它的速度可以達到每秒0.44米,但是法拉利的實驗室正在開發基于事件的算法,該算法將通過敏捷性來補充機器人的速度。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")