您現在的位置是:首頁 >要聞 > 2020-12-17 14:19:35 來源:
全地形微型機器人在復雜的地形上翻滾
導讀 通過翻滾移動的新型全地形微型機器人可以幫助將微型機器引入各種應用。微型磁性翻滾機器人或μTUM(microTUM)大約為400 x 800微米,即百
通過翻滾移動的新型全地形微型機器人可以幫助將微型機器引入各種應用。
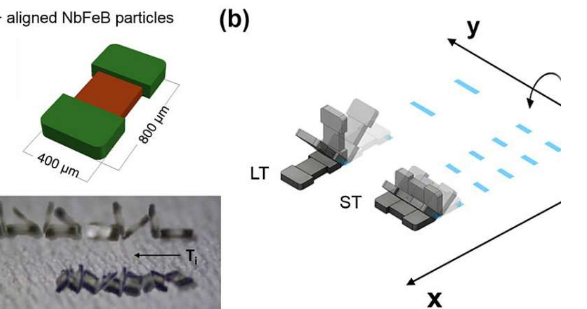
“微型磁性翻滾機器人”或μTUM(microTUM)大約為400 x 800微米,即百萬分之一米,比銷的頭部小。連續旋轉的磁場會推動微型機器人以端對端或側向滾動的方式運動,這有助于微型機器人穿越凹凸不平的表面,例如顛簸和溝槽,這對于其他形式的運動而言是一項艱巨的任務。
普渡大學機械工程學院副教授,普渡大學多尺度機器人與自動化實驗室主任David Cappelleri表示:“μTUM能夠在干燥和潮濕的環境中穿越復雜的地形。
2月3日在線發表在Micromachines雜志上的研究論文中詳細介紹了這些發現。該論文由普渡大學研究生畢成浩撰寫。博士后研究助理Maria Guix;博士生本杰明·約翰遜;勞明士工業大學機械工程學助理教授吳武明;和Cappelleri。
扁平的啞鈴形微型機器人由聚合物制成,并具有兩個磁性末端。非磁性中央部分可用于運載藥物等貨物。由于該機器人在潮濕環境中的功能很好,因此具有潛在的生物醫學應用程序。
Cappelleri說:“微米和納米級的機器人技術代表了智能自動化系統的新領域之一。” “特別是,移動微型機器人最近憑借其小巧的尺寸,操控性和自主運動能力,成為生物醫學應用的可行候選者。靶向藥物遞送是這些納米和微型機器人的關鍵應用之一。”
藥物運送微型機器人可能會與超聲波結合使用,以將其引導到體內。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")