您現在的位置是:首頁 >要聞 > 2020-12-17 14:19:36 來源:
通過模仿蟑螂的頭部來教機器人爬墻
導讀 通過模仿蟑螂的頭部來教機器人爬墻來自加利福尼亞大學,哈佛大學和賓夕法尼亞州立大學的一組研究人員發現了一種簡單的方法,可以讓機器人撞
通過模仿蟑螂的頭部來教機器人爬墻
來自加利福尼亞大學,哈佛大學和賓夕法尼亞州立大學的一組研究人員發現了一種簡單的方法,可以讓機器人撞墻時改變飛機的位置(以蟑螂為例),它只是將墻壁的物理形狀撞在墻上使它開始向上攀爬。研究人員在“皇家學會接口雜志”上發表了他們的機器人設計論文。
為了在現實世界中自行操作,機器人具有計算機頭腦和許多代碼,但是有時,研究人員用這種新的努力發現,更容易采用更簡單的方法。在蟑螂沒有做當它在地板上skittering并符合墻壁它只是猛地頭扎入墻,它身體的形狀帶有其頭部和上身向上,而它的腿不停攪動很多思考。這種方法允許蟑螂無需處理即可更換飛機,并且可以一直沿墻運行。它發生的時間很短,僅需75毫秒。
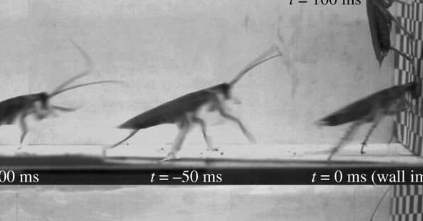
在設計能夠爬墻的機器人時,必須考慮從地板到墻壁的過渡-如果分解成多個步驟,則該過程可能會花費硬件和大量代碼。但是研究人員想知道他們是否可以設計出一種蟑螂形狀的機器人,該機器人可以先撞入墻壁。為了找到答案,他們在實驗室拍攝了蟑螂,撞到墻壁上然后向上爬,然后著手設計一個模仿他們發現的機器人。他們決定采用簡單的盒形設計-一種小型,輕巧的機器人,適合手掌,它具有錐形鼻子和六個腿,無論發生什么情況都可以不斷向前推進。他們進行了幾次試驗,以微調他們的創作,然后拍攝結果。這是一個非常簡單的機器人,可以從水平姿勢轉變為機器人,
這個小機器人還不能爬墻,但是無需額外的硬件或軟件即可完成過渡,這是該過程中至關重要的一步。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")