您現在的位置是:首頁 >要聞 > 2020-12-17 08:09:24 來源:
EuMoBot在軟機器人中復制鷹骨運動
導讀 游泳是自然界中各種規模的許多生物所采用的一種運動形式。具有較小質量的微生物在介質中會遇到粘性力的支配,因此要求其形狀不隨時間變化,
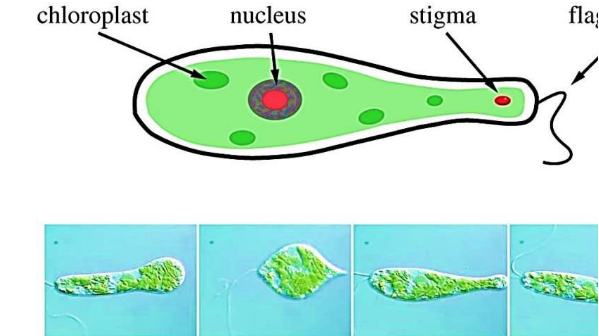
游泳是自然界中各種規模的許多生物所采用的一種運動形式。具有較小質量的微生物在介質中會遇到粘性力的支配,因此要求其形狀不隨時間變化,以實現與流體力學一致的流體推進。為了克服這一挑戰,Euglena家族的單細胞鞭毛進化了一種稱為“真骨類運動”的特征運動,該運動使人體顯著改變形狀,使生物能夠在粘性流體和微小空間中導航。這種改變身體形狀并在受限空間和混亂環境中移動的能力在工程仿生機器人中特別具有吸引力。
受串珠類的啟發,克里希納·馬納斯維·迪古瑪蒂(Krishna Manaswi Digumarti)和工程與數學系的同事們介紹了多段式軟機器人EuMoBot的設計和開發。仿生機器人可以復制較大的身體變形以進行運動。在這項研究中,科學家設計了兩個大小不同的機器人,以使其內部體積恒定。該工程規程利用充滿流體的彈性腔體的超彈性來復制類鷹嘴類動物的運動。在這兩個中,較小的機器人每個周期以1/5體長的速度移動,而較大的機器人每個周期以1/10體長的速度移動。研究表明仿生機器人是多么柔軟 可以用來改變形狀和復制生物運動,同時充當研究仿生機器人的工具。
科學家們還提出了一種基于橢圓傅立葉描述符的定量方法,以表征和比較機器人的形狀及其生物學上的類鷹嘴豆形生物。結果表明形狀相似度達到85%,表明該工程技術可用于開發微型機器人。該方法使科學家能夠了解非線性,動態軟機器人中形狀的演變,這些機器人沒有特定的形狀可以建模。該研究的結果現已發表在《皇家學會接口雜志》上。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")