您現在的位置是:首頁 >要聞 > 2020-12-14 17:19:38 來源:
多機器人系統的分散軌跡生成算法
導讀 印度SRM科學技術研究所的研究人員最近開發了一種用于多主體系統的分散式軌跡生成算法。他們的算法發表在arXiv上的一篇論文中,當提供初始狀
印度SRM科學技術研究所的研究人員最近開發了一種用于多主體系統的分散式軌跡生成算法。他們的算法發表在arXiv上的一篇論文中,當提供初始狀態和所需的最終姿勢時,可以為機器人生成無碰撞的軌跡。
負責這項研究的高級研究員西瓦娜森·K(Sivanathan K)告訴TechXplore:“戈文德和他的團隊雄心勃勃地向我尋求關于他們的學士學位項目的建議。” “知道了他們的數學能力,我覺得應該給他們分配一個有挑戰性的問題,未來有待解決。隨著世界朝著無人駕駛汽車的方向發展,我建議開發一種去中心化算法,用于無人駕駛汽車在交叉路口導航。我們感到該算法的性能未達到標準,因此我們將工作擴展到開發一種算法,該算法可以使自動駕駛汽車在未知環境中導航,從而避免與其他機器人/障礙物發生碰撞。”
多機器人系統涉及許多協作完成各種任務的機器人代理或自動駕駛汽車。這些系統可能在許多領域具有有趣的應用,包括運輸,娛樂,安全和太空探索。
當多個機器人一起完成一項給定任務時,需要仔細規劃其軌跡,以確保這些機器人不會相互碰撞,并且不會違反其動態限制。到目前為止,大多數軌跡生成方法已經集中化,這意味著它們可以預先生成軌跡,然后將其傳輸到各個機器人。
盡管集中式方法在已知環境中使用的機器人數量有限,但效果很好,但很難大規模應用。因此,近年來,研究人員一直在研究分散的方法,這些方法可以連續地重新規劃軌跡,以應對環境中的意外變化或障礙。
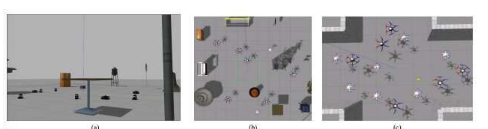
SRM研究所的研究人員團隊開發了一種新的去中心化算法,用于生成多主體系統的軌跡。他們的方法遵循兩步過程,通過預測其他機器人的位置,生成機器人將被約束在其中的無碰撞凸區。
")









")
")
")
")
")
")
")
")
")