您現在的位置是:首頁 >要聞 > 2020-12-11 11:26:51 來源:
用于可變形機器人指尖的減摩系統
導讀 金澤大學的研究人員最近開發了一種基于潤滑效果的減摩系統,該系統可能具有有趣的軟機器人應用。在泰勒和弗朗西斯(Taylor&Francis)的Advanc
金澤大學的研究人員最近開發了一種基于潤滑效果的減摩系統,該系統可能具有有趣的軟機器人應用。在泰勒和弗朗西斯(Taylor&Francis)的Advanced Robotics(高級機器人)雜志上發表的一篇論文中介紹了他們的系統,該系統可以幫助開發可以在干燥和潮濕條件下有效操縱物體的機器人。
從事這項研究的研究人員之一的渡邊哲(Tetsuyou Watanabe)對TechXplore表示:“我們先前開發的柔軟機器人手的表面紋理或皮膚在干燥和潮濕條件下都具有很高的摩擦力。” “但是,這種高摩擦力使幾種操縱方式(包括釋放和滑動)變得困難。在某些情況下,被抓的物體會粘在表面上。為克服此問題,我們開發了一種使用潤滑劑的新型減摩擦系統。”
在開發系統時,渡邊和他的同事們從人類行為中汲取了靈感。他們觀察到,在超市里,人們經常舔手指打開塑料袋或容器。嘗試拾紙或翻書時,也會執行類似的操作。
研究人員發現,這種“手指舔”行為在中老年人中尤為常見,因為衰老通常會導致皮膚干燥。另一方面,年輕人在嘗試操縱塑料或紙張時通常不需要舔手指,因為他們可以通過身體的出汗機制自動控制皮膚的摩擦。
渡邊說:“當然,舔手指的目的是要獲得高摩擦力,而這與我們的目的(即減少摩擦)完全不同。” “但是,通常潤滑劑的目的是減少機械系統中的摩擦。因此,我們考慮了類似于人的汗液控制的減少摩擦系統的可能性。”
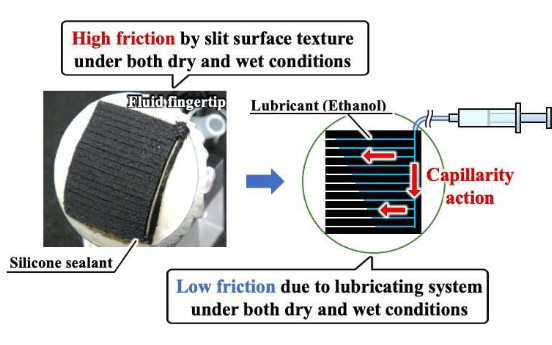
研究人員構建了一個機械指尖,該指尖的表面有縫隙。當潤滑劑(例如乙醇)注入這些狹縫的邊界周圍時,它們會通過毛細作用滲透到整個表面。
渡邊說:“我們利用了包括紋理在內的薄表面積,該系統不僅可以在剛性物體上而且可以在可變形物體上工作,而不會失去對物體形狀的適應性。” “因此,我們系統的主要優點是可以在保持表面變形性和適應性的同時控制表面摩擦。這意味著開發的系統可以安裝在具有軟體的機器人上。”
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")