您現在的位置是:首頁 >要聞 > 2020-12-11 11:24:55 來源:
研究人員開發了新型飛行駕駛機器人
導讀 內蓋夫大學本古里安大學(BGU)研究人員開發出了第一架實驗性無人機,它像典型的四軸飛行器一樣飛行,可以在崎terrain的地形上行駛并使用相同
內蓋夫大學本古里安大學(BGU)研究人員開發出了第一架實驗性無人機,它像典型的四軸飛行器一樣飛行,可以在崎terrain的地形上行駛并使用相同的電動機擠入狹窄的空間。
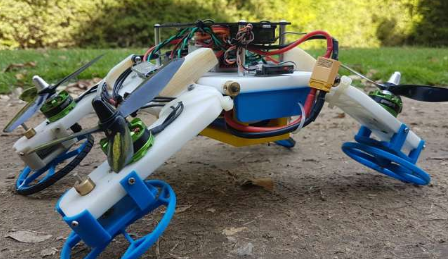
混合動力FSTAR(飛行展臂式自動機器人)將于5月21日在蒙特利爾舉行的2019年機器人與自動化國際會議上推出。它是由BGU生物啟發與醫療機器人實驗室由高級講師David Zarrouk教授開發的。在BGU的機械工程系任教,是生物啟發和醫療機器人實驗室的負責人,他的研究生Nir Meiri。
FSTAR可以越過障礙物或在障礙物下面奔跑。展寬從平面配置調整到55度,使機器人可以將其運動從飛行的四軸飛行器轉變為類似汽車的機器人。它還可以調整寬度,以在平坦的表面上爬行或奔跑,越過大型障礙物并向上爬近距離的墻壁,或者擠過隧道,管道或狹窄的縫隙。
它可以以每秒八英尺(2.6 m / s)的速度在地面上運行。結合使用同一電機的低能耗,FSTAR成為需要更長工作時間的廣泛應用的理想之選。
可能的商業用途是包裹運送,因為它可以快速飛到目標區域,然后安全,安靜地使用其輪子驅動到達收件人的家門口。FSTAR還可以用于搜索和救援應用,因為它可以飛越各種障礙物并在常規無人機無法飛行的裂縫之間或下方爬行。該機器人還可以用于農業,維護,清潔,拍攝和娛樂,以及執法和反恐應用。
“我們計劃開發更大和更小的版本,以擴展該系列散布機器人的適用范圍,使其適用于不同的應用,以及將有助于開發這些飛行/驅動機器人的運輸速度和成本的算法。” 扎魯克博士說。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")