您現在的位置是:首頁 >要聞 > 2020-12-08 17:00:38 來源:
能夠執行3D噴氣推進和操縱的新型機器人水母
導讀 作為靈感的來源,魚類,鯨類和水母等水生生物可以激發創新設計,以改善人造系統在水生環境中運作并與水生環境相互作用的方式。在自然界中,
作為靈感的來源,魚類,鯨類和水母等水生生物可以激發創新設計,以改善人造系統在水生環境中運作并與水生環境相互作用的方式。在自然界中,水母通過使鐘形物體徑向膨脹和收縮以將水推向身后,從而在周圍環境中自我推動,這被稱為射流推進。
與將水母描述為低效率游泳者的普遍觀點相反,水母已被證明是能量效率最高的游泳者之一。即,已經表明,如果需要低能量推進,則類似水母的游泳將具有顯著的推進優勢。因此,在過去十年中,在受到生物啟發的水下航行器的背景下,水母的運動引起了極大的興趣。
最近,來自中國科學院自動化研究所的研究人員在中國北京成功開發了一種新型機器人水母,該機器人水母基于增強學習方法可以執行三維水母般的推進和操縱。
研究人員結合了機電設計,材料,電子學和控制方法的最新進展,致力于開發智能致動器來制造各種機器人水母。通常,與傳統電動機驅動的機器人水母相比,這種機器人水母經常被束縛并且速度要慢得多。現有的大多數機器人水母無法自由地調整其三軸姿態,這對自由游動推進和合理的應用產生了不利影響。
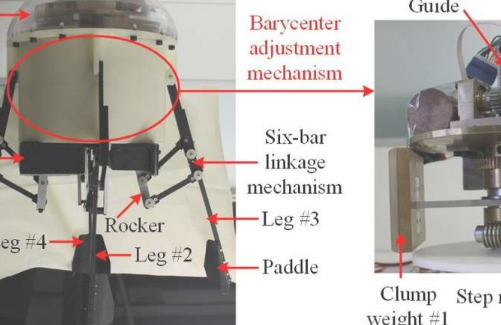
設計的機器人水母以Aurelia aurita(通常稱為月亮水母)為模型,該水母具有相對較大的排量,特別適合用于大負載能力。它高約138毫米,重約8.2千克。如圖1所示,機器人水母呈半球形,由鐘形剛性頭,圓柱狀主腔,四個獨立的六連桿機構和柔軟的橡膠皮組成。為了增強機器人水母的可操縱性,引入了在腔體內組裝的重心調節機構。通過在垂直或水平方向上或在兩者的組合中調整兩個塊的權重,可以實現姿態調節。
")
")
")
")

")
")
")
")
")
")
")
")
")
")
")