您現在的位置是:首頁 >要聞 > 2020-12-07 16:01:47 來源:
人工微游泳的自適應運動
細菌通過響應于局部變化的物理和化學條件而利用力學表現出顯著的可塑性。順從的結構通常會幫助出租車的行為在復雜而結構化的環境中導航。受生物啟發的微生物機制包含合理設計的架構,該架構能夠進行大的非線性變形,從而將自主權引入工程化的小型設備中。
在最近的一項研究中,HW Huang及其機械工程,應用數學和理論物理系的同事分析了低雷諾數下流體動力和局部流變對游泳的影響。在工作中,他們確定了在運動中使用彈性-流體動力耦合技術開發一套機械設備的挑戰性和收益,這些機械設備可以制造具有自律性的不受束縛的微型機器人。在沒有板載傳感器的情況下,在自適應運動過程中,科學家能夠證明人造微游泳者的結構和磁性與流體的動力學特性之間的耦合。結果現已發表在《科學進展》上。
微生物包含多種分子運動的機制,可以有效地導航復雜的環境和生態位。在細菌中,游動由鞭毛,細胞體與血流產生的阻力之間的機械相互作用引起。雷諾數低時的粘滯力會引起流體阻力,而阻力又取決于運動物體的形狀。
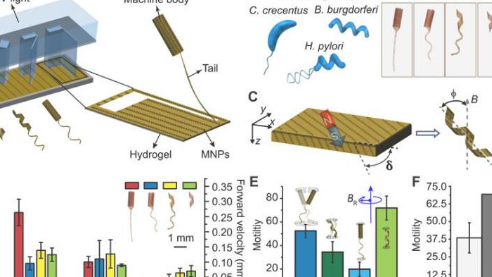
為了優化其運動能力,細菌可以在其生命周期中采用其他形狀和大小。除了改變身體形狀,細菌還可以使用推進系統在復雜環境中進行高級運動。例如,通過彎曲鉤形彎月桿菌可以增強運動能力,而溶藻弧菌由于鞭毛屈曲的不穩定性,在攀登營養梯度中可以勝過多鞭毛大腸桿菌。此外,腐臭希瓦氏菌可以通過鞭毛絲中的多態性轉變逃脫物理陷阱。
研究人員通過生物啟發式微工程學開發的微觀人工游泳器,可通過體液,穿過生物屏障并進入疾病的偏遠地區,從而可能徹底改變靶向療法。在該領域的開拓性工作已經證明了模仿原核或真核鞭毛構建具有不可逆運動的磁控微游泳器的可行性。但是,與活細胞不同,這些機械設備無法感應其局部環境或適應物理條件的變化。控制人造材料可以為構建可調節,持久且強大的工程解決方案鋪平道路,例如自主生物混合機器人設備。
")
")
")
")

")
")
")
")
")
")
")
")
")
")
")