您現在的位置是:首頁 >要聞 > 2020-12-07 15:53:40 來源:
跳躍和撲翼微型機器人的新設計
加州大學伯克利分校的研究人員最近設計了兩種昆蟲規模的微型機器人,一種可以跳躍,另一種可以拍打其人造翅膀。這些機器人的設計中,提出了2 篇論文上的arXiv預公開,模擬真實的生物行為,昆蟲觀察。這兩個微型機器人是由果蠅機器人和跳躍µbot所開發的。在其教授克萊爾·湯姆林(Claire Tomlin)的指導下,學生巴拉克·布珊(Parak Bhushan)作為論文的一部分。
將來,微型機器人可能會具有許多重要的應用,可以幫助人類完成諸如遙感,自然災害后尋找幸存者以及太空探索等任務。實際上,微型機器人具有幾個有利的特征,包括它們的體積小,類似昆蟲的可操縱性以及在挑戰性地形中的導航更容易。
“穩健性,以強悍的地形通常與環境增加了更小的機器人交互,”普山和湯姆林說TechXplore。“飛行物和跳線(例如蒼蠅,蚱grass等)通過飛越/跳躍越過障礙物并到達下一個目的地來最小化這種相互作用,而螞蟻則必須越過每個小顛簸。飛行物與地球和其他物體更相關大氣層的行星,而跳線對于沒有大氣層且重力較低的地方更為重要。”
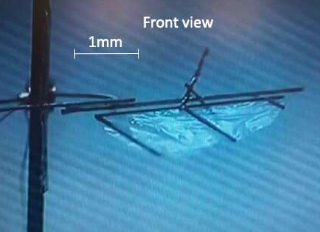
研究人員開發的第一個機器人,他們稱為果蠅機器人,是有史以來開發的第一個有效模仿昆蟲翅膀運動學的亞毫米翼飛機。迄今為止,大多數小型撲翼微型機器人的質量均為100毫克。但是,在自然界中,微小的飛行昆蟲(例如果蠅)的質量等級為1毫克,有些甚至更小。
lin。
研究人員解釋說:“開發這種特殊的微型機器人的動機是彌合已制造的產品與可能的產品之間的尺寸差距。” “我們的主要目標是使用機載電動機和機構,但使用外部電源,以這種尺寸展示襟翼的運動。”
小型飛行昆蟲通常通過執行較大的機翼沖程產生升力。Bhushan和Tomlin在開發此機器人時面臨的主要挑戰之一是制造小型致動器,而不是能夠產生足夠大的旋轉來驅動人造機翼的致動器。
Bhushan和Tomlin解釋說:“以前的作品使用的是小旋轉電動機,然后使用放大機構將該運動放大為大旋轉。” “即使對于100毫克規模的機器人,這些放大機構的特征尺寸也可降至70um。簡單地將設計縮小100倍,將導致電機運動更小,進而需要放大機構中更小的特征尺寸,不可行。”
")
")
")
")

")
")
")
")
")
")
")
")
")
")
")