您現在的位置是:首頁 >要聞 > 2020-12-07 15:53:49 來源:
工程師建造可變形的自主船隊
麻省理工學院的機器人船隊已經更新,具有新功能,可以通過自動斷開并重新組裝為各種配置,在阿姆斯特丹的許多運河中形成浮動結構,從而實現“變形”。
作為MIT和阿姆斯特丹高級城市解決方案研究所(AMS Institute)之間正在進行的“ Roboat”項目的一部分,正在開發自動船,即裝有傳感器,推進器,微控制器,GPS模塊,照相機和其他硬件的矩形船體。該項目由麻省理工學院的教授Carlo Ratti,Daniela Rus,Dennis Frenchman和Andrew Whittle領導。將來,阿姆斯特丹希望這些游艇在165條蜿蜒的運河中巡游,運送貨物和人員,收集垃圾或自行組裝到“彈出式”平臺(例如橋梁和舞臺)中,以幫助緩解城市繁忙街道上的擁擠狀況。
2016年,麻省理工學院的研究人員測試了一種可以在運河中預先設定的路徑上前進,后退和橫向移動的游艇原型。去年,研究人員設計了低成本,3D打印,四分之一比例的船型,效率更高,更加靈活,并配備了先進的軌跡跟蹤算法。在6月,他們創建了一種自主的閂鎖機制,使船只可以互相瞄準并相互扣緊,并在失敗時繼續嘗試。
在上周的IEEE多機器人和多智能體系統國際研討會上發表的一篇新論文中,研究人員描述了一種算法,該算法可使船艇盡可能高效地平滑重塑自身。該算法處理所有計劃和跟蹤,從而使成組的船艇單元可以在一組固定配置中彼此解鎖,行進無碰撞路徑并重新附著到新的固定配置上的適當位置。
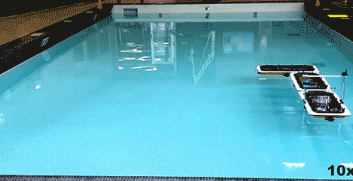
在MIT池中的演示和計算機仿真中,成組的相連輪船單元從直線或正方形重新排列為其他配置,例如矩形和“ L”形。實驗性轉換僅花費了幾分鐘。更復雜的變形可能需要更長的時間,具體取決于移動單位的數量(可能是幾十個)以及兩個形狀之間的差異。
計算機科學與人工智能實驗室(CSAIL)和安德魯(Andrew)的負責人羅斯(Rus)說:“我們已經使這些木船現在能夠與其他木船建立和斷開連接,希望將阿姆斯特丹街頭的活動轉移到水上。”以及電氣工程和計算機科學教授Erna Viterbi。“如果我們需要將材料或人員從運河的一側傳送到另一側,則一組船可以聚在一起形成線性形狀,成為彈出式橋梁。或者,我們可以為花朵或食物創建彈出式更寬的平臺市場。”
")
")
")
")

")
")
")
")
")
")
")
")
")
")
")