您現在的位置是:首頁 >要聞 > 2020-12-07 15:45:47 來源:
研究人員建造了由肌肉神經推動的微觀生物混合機器人
研究人員已經開發了由神經肌肉組織驅動的軟機器人設備,這些設備在受到光刺激時就會觸發,從而使機械工程技術比自主生物機器人的開發更近一步。
2014年,由伊利諾伊大學機械科學與工程教授Taher Saif和生物工程教授Rashid Bashir領導的研究團隊共同合作,開發了首款由擊敗大鼠心肌細胞驅動的自行式生物雜交游泳和步行生物機器人。
賽夫說:“我們的第一個游泳者研究成功地證明了以精子細胞為模型的機器人實際上可以游泳。” “那一代單尾機器人利用了自己跳動的心臟組織,但是他們無法感知環境或做出任何決定。”
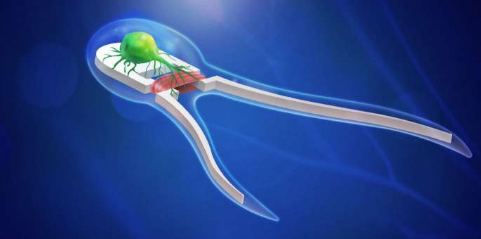
在由Saif領導的《美國國家科學院院刊》上發表的一項新研究中,研究人員展示了新一代的兩尾僵尸機器人,它們由車載運動神經元刺激的骨骼肌組織提供動力。神經元具有光遺傳學特性:暴露于光線下,神經元將發射光以致動肌肉。
賽夫說:“我們在小鼠肌肉組織附近應用了一種來自小鼠干細胞的光遺傳神經元細胞培養物。” “神經元向肌肉前進并形成神經肌肉連接,游泳者自行組裝。”
在確認神經肌肉組織與其合成的生物機器人骨架兼容后,研究小組致力于優化游泳者的能力。
研究團隊從左至右包括Taher Saif教授,研究生Onur Aydin,研究生Xiastian Zhang,Mattia Gazzola教授,Gelson J. Pagan-Diaz研究生,Rashid Bashir的Grainger工程學院教授和系主任。 。圖片來源:L。Brian Stauffer
賽夫說:“我們使用由機械科學與工程學教授馬蒂亞·加佐拉(Mattia Gazzola)領導的計算模型來確定哪些物理屬性將導致最快和最有效的游泳。” “例如,我們研究了最有效地設計生物雜交游泳者的尾巴和尾巴長度的變化。”
Gazzola說:“鑒于生物致動器或生物機器人不如其他技術成熟,因此它們無法產生大的力。這使它們的運動難以控制。” “非常重要的一點是,仔細設計生物機器人能夠生長和相互作用的支架,以充分利用技術并實現機車功能。我們運行的計算機模擬在這項任務中起著至關重要的作用,因為我們可以跨越許多可能的設計并只選擇最有前途的工具進行現實生活中的測試。”
")
")
")
")

")
")
")
")
")
")
")
")
")
")
")