您現在的位置是:首頁 >要聞 > 2020-12-03 12:55:33 來源:
移動3D打印機器人團隊可以在地球上固定橋梁并將其建造到火星上
商業3D打印(或增材制造(AM))是一個蓬勃發展的行業。但是,如果打印機從涉及固定盒子和龍門架的典型設置中解放出來,并可以自由地在巡回的協作團隊中工作,那么AM業務的規模可能會更大,并具有更多的應用程序,包括作為建筑工地的機器人泥瓦匠和維修崩潰的機器城鄉民用基礎設施。
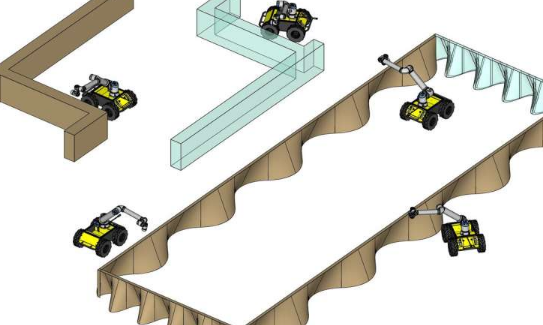
紐約大學丹頓工程學院的一個多學科機器人團隊由紐約大學城市科學與進步中心(CUSP)主辦,并獲得了美國國家科學基金會(NSF)的120萬美元資助,旨在通過設計使該概念成為現實用于連接到移動粗紗平臺的機械臂上的3D打印機的自治系統。這些打印機具有團隊學習功能(一種稱為集體增材制造(CAM)的概念),具有機器學習和其他人工智能(AI)功能,可以修復橋梁,隧道和其他市政結構。在海洋深處和災區工作;甚至前往太空在月球,火星及其他地方工作。
研究人員陳峰,毛里齊奧·波菲里(Maurizio Porfiri),盧多維奇·里蓋蒂(Ludovic Righetti)和金衛華(Weihua Jin)是土木與城市工程,機械與航空航天工程以及電氣和計算機工程系的教授,他們將專注于三個領域,這些領域對于進行3D打印至關重要CAM團隊可行:自治,控制,實時系統和網絡:
規劃和本地化:打印機必須能夠相對于彼此以及它們隨著變化和增長而構建的結構進行本地化,并且在不依賴于全球定位系統的情況下進行本地化,尤其是對于外星應用
模型預測控制:移動基座和機械手必須足夠高效和穩定,以實現快速,高質量的打印,并且能夠實時適應現場實際條件中的意外或意外變化,或者打印頭沉積水泥或其他材料的方式出現意外變化
打印和協調:使用要打印的零件的設計和實際演變的結構本身作為地圖,實現多臺打印機的運動同步,以實現打印機器人的物理協調
Feng解釋說,目標是為了提高準確性,效率和對環境以及實時條件的適應性-而不是導航應用程序重新路由它感覺到的車輛偏離映射路線的方式。但是,與典型的基于GPS的導航服務不同,這些調整必須閃電般快速且精確到幾毫米,而不是幾十英尺。他補充說,團隊在機器人技術,人工智能,控制理論和動力學系統方面的專業知識的獨特組合使挑戰無可克服。
Feng將專注于計劃和本地化,應對諸如如何使機器人能夠識別何時以及何時不需要自身高度精確化等挑戰。
他說:“機器人必須能夠快速移動到印刷區域,觀察真實條件(例如,由于現實世界不是平坦的,所以地面不平坦),然后立即進行補償。” 他解釋說:“雖然我們希望在結構區域具有更高的準確性,但離結構越遠,所需的資源就越少。” “這將涉及一種新型的主動本地化。”
")


")


")



")
")
")
")
")
")
")
")
")