您現在的位置是:首頁 >要聞 > 2020-12-02 17:11:14 來源:
人類如何走向智能微型機器人
導讀 Paul Scherrer研究所PSI和ETH Zurich的研究人員已經開發出可以執行不同動作的微機。首先對微型機器人組件中的納米磁鐵進行磁編程,然后通
Paul Scherrer研究所PSI和ETH Zurich的研究人員已經開發出可以執行不同動作的微機。首先對微型機器人組件中的納米磁鐵進行磁編程,然后通過磁場控制各種運動。這樣的機器,只有幾十微米寬,可以用于例如人體中的小型操作。研究人員現在將其結果發表在科學雜志《自然》上。
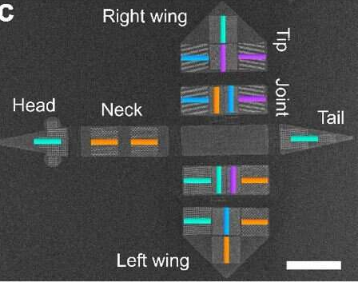
該機器人的尺寸僅為幾微米,讓人聯想到日本折紙藝術-折紙制成的紙鳥。但是,與紙質結構不同,機器人在沒有可見力的情況下仿佛靠魔術般運動。它拍打翅膀或彎曲脖子并縮回頭部。磁性使這些動作全部成為可能。
Paul Scherrer研究所PSI和ETH Zurich的研究人員已經使用包含小型納米磁鐵的材料組裝了微型機器。可以對這些納米磁鐵進行編程,使其呈現特定的磁性方向。然后,將編程的納米磁鐵暴露在磁場中時,特定的力就會作用在它們上。如果這些磁體位于柔性組件中,則作用在其上的力會導致組件移動。
對納米磁鐵進行編程
納米磁鐵可以一次又一次地編程。該重新編程導致不同的力,并且導致新的運動。
為了建造微型機器人,研究人員在氮化硅薄板上制造了鈷磁體陣列。用這種材料制成的鳥可以執行各種動作,例如拍打,盤旋,轉彎或側滑。
")









")
")
")
")
")
")
")
")
")