您現在的位置是:首頁 >要聞 > 2020-12-02 17:11:15 來源:
未來的軟機器人可能依賴于導電感知損壞
導讀 過去,機器人只能在工廠進行繁重的工作或進行精細的工作。現在,波士頓動力公司靈活的四足機器人Spot可供公司租借以執行各種實際工作,這標
過去,機器人只能在工廠進行繁重的工作或進行精細的工作。現在,波士頓動力公司靈活的四足機器人Spot可供公司租借以執行各種實際工作,這標志著近年來人機之間的普通交互已經變得多么普遍。
盡管Spot具有通用性和魯棒性,但它卻被社會視為傳統機器人,即金屬和硬塑料的混合物。許多研究人員堅信, 能夠與人進行安全的物理交互的軟機器人(例如,通過抓握和移動物體來提供居家幫助)將與硬機器人一起為未來創造條件。
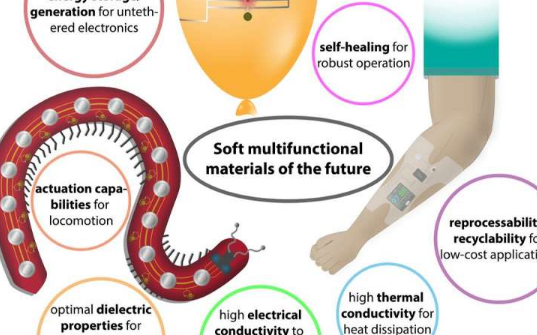
柔軟的機器人技術和可穿戴計算機,這兩種對于人類交互而言都是安全的技術,它們將需要新型的材料,這些材料必須柔軟,可拉伸,并具有多種功能。我和我在卡內基梅隆大學軟機械實驗室的同事開發了這些多功能材料。與 合作者一起,我們最近開發了一種這樣的材料,它獨特地結合了金屬,軟橡膠和形狀記憶材料的特性。
這些柔軟的多功能材料(我們稱為它們)可以導電,檢測損壞并自我修復。它們還可以感應觸摸并響應電刺激(例如人造肌肉)改變其形狀和剛度。在許多方面,這都是開創性的研究人員Kaushik Bhattacharya和Richard James所說的:“材料就是機器。”
使材料智能化
物質就是機器的想法可以體現在體現智能的概念中。該術語通常用于描述互連的材料系統,例如膝蓋中的肌腱。跑步時,每次腳踩到地面時,肌腱都可以拉伸和放松以適應,而無需任何神經控制。
")









")
")
")
")
")
")
")
")
")