您現在的位置是:首頁 >要聞 > 2020-12-02 08:29:36 來源:
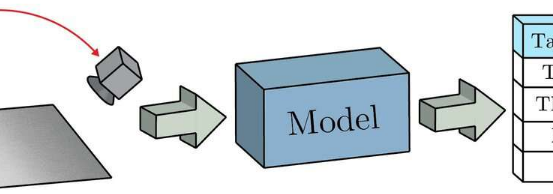
通過分析圖像估算表面的觸覺特性的模型
估計對象的物理屬性的能力對機器人至關重要,因為它使機器人可以更有效地與周圍環境進行交互。近年來,許多機器人技術研究人員一直在專門嘗試開發技術,以使機器人能夠估計物體或表面的觸覺特性,從而最終為他們提供類似于人類觸摸感的技能。
基于先前的研究,馬修·普里(Matthew Purri)博士 羅格斯大學(Rutgers University)的計算機視覺和人工智能專業的學生最近開發了一種基于卷積神經網絡(CNN)的模型,該模型可以通過分析表面圖像來估計表面的觸覺特性。Purri的新論文預先發表在arXiv上,由Rutgers電氣工程教授Kristin Dana監督。
Purri告訴TechXplore:“我以前的研究涉及從衛星圖像中進行細粒度的材料分割。” “衛星圖像序列以不同的視角和照明角度以及多光譜信息的形式提供了有關場景的大量物質信息。我們從以前的工作中了解到有價值的多視點信息對于識別材料是多么重要,并且相信這些信息可以起到物理表面性質估計問題的線索。”
Dana和Rutgers的其他研究人員以前曾嘗試開發一種技術,該技術可根據反射盤圖像來估計表面的摩擦系數。一種特定類型的圖像,顯??示多少表面或材料能夠反射輻射能。Purri在他的論文中著手進一步開發此方法,以便可以從RGB圖像估計更多的物理屬性。
Purri解釋說:“這個新項目的目的是僅通過視覺信息來估計表面的眾多物理特性,例如摩擦和柔韌性。” “我們與SynTouch公司合作,該公司創建了一個名為Toccare的觸覺傳感器,該傳感器可測量表面的多種觸覺物理特性。在我們的arXiv論文中,我們探索了從單個圖像和多個圖像估計這些特性的可能性。 。”
Purri和Dana在研究中探索的另一個問題是,拍攝不同輸入圖像的角度是否會影響他們的神經網絡估計表面物理性質的程度。但是,代替手動選擇不同的視角,研究人員設計了一種模型,該模型可以自動學習最佳視角組合以及理想的神經網絡參數。
")









")
")
")
")
")
")
")
")
")