您現在的位置是:首頁 >要聞 > 2020-11-26 09:26:03 來源:
可以行走和爬上障礙物的微型機器人
土耳其比爾肯特大學的研究人員最近創建了一個名為SQuad的小型四足機器人,該機器人由柔軟的結構材料制成。這種獨特的機器人發表在IEEE機器人與自動化快報上,其論文比現有的微型機器人更靈活,因此更擅長攀爬或避開周圍環境中的障礙物。
進行這項研究的研究人員之一Onur Ozcan告訴TechXplore:“我們從事微型機器人的研究已有近十年了。” “盡管微型機器人具有很多優點,例如便宜,需要更少的材料以及能夠進入狹窄空間的能力,但它們的主要缺點之一是缺乏運動能力,尤其是在崎uneven的地形上。”
微小的機器人在周圍環境中移動時容易卡住,因為它們的高度不允許它們攀爬或避開障礙物。奧茲坎(Ozcan)和他的同事們試圖通過實施稱為“身體順從性”的原則來克服這一限制。
奧茲坎說:“我們認為,通過使我們的微型機器人柔軟,他們將能夠利用身體的順應性來越過障礙,就像昆蟲或老鼠等大多數生物系統一樣。”
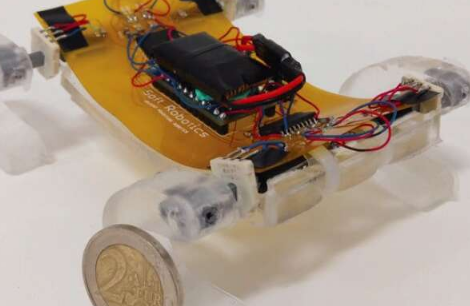
SQuad是研究人員開發的手掌大小的四足機器人,主要由柔軟的材料制成,例如聚二甲基硅氧烷(PDMS)。該機器人還具有帶集成直流電動機的柔軟C形腿,可使其旋轉。
Ozcan說:“大多數軟機器人都是使用氣動執行器建造的。” “這些執行器可以很好地工作并與軟質材料很好地集成在一起,但是它們需要壓縮空氣源,這通常會使機器人笨重,有時甚至不允許束縛運動。我們希望設計一種能夠將兩個方面的優勢融合在一起的機器人;這種柔軟的材料可以制造出合格的機器人,而且還可以使用常規的執行器(例如直流電動機)來輕松實現小型化和不受限制的運動。”
研究人員在一系列實驗中對他們的機器人進行了評估,將其運動性能與由剛性材料制成的相同機器人的運動性能進行了比較。SQuad在很大程度上超越了其他機器人,從而更有效地克服了障礙。
值得注意的是,由Ozcan和他的同事開發的機器人可以克服比其身高高1.44倍的障礙。另一方面,他們將其與剛性機器人進行比較,只能成功越過障礙物,而障礙物的高度是其身體高度的0.88倍。
奧茲坎說:“我們觀察到的可伸縮障礙物高度的差異是由于SQuad的身體順應性引起的。” “我們認為,通過這樣的改進,我們可以將該機器人用于檢查目的(在船上添加一個小型攝像頭),或者在倒塌的建筑物下找到幸存者(同樣可以集成攝像頭和麥克風來檢測幸存者)。”
")
")
")
")

")
")
")
")
")
")
")
")
")
")
