您現在的位置是:首頁 >要聞 > 2020-11-25 08:52:59 來源:
四足機器人使復雜的機器人技術適用于所有人
能夠定義高級物理動作(如步行,跳躍和導航地形)的復雜機器人的價格可能高達50,000美元或更多,這使許多人無法進行現實世界的實驗。現在,位于紐約州蒂賓根和斯圖加特的紐約大學丹東工程學院和馬克斯·普朗克智能系統研究所(MPI-IS)的協作團隊設計了一種成本相對較低,易于組裝的四足機器人。可以升級和修改的名為“ Solo 8”的機器人,為預算有限的團隊(包括初創企業,小型實驗室或教學機構的團隊)打開了進行復雜研發的大門。
研究人員的工作“用于腿部運動研究的開放式扭矩控制模塊化機器人體系結構”已在《機器人與自動化快報》上發表,該論文將于本月晚些時候在ICRA(世界機器人與自動化國際會議之一)上發表。領先的機器人會議,將以虛擬方式舉行。
該團隊由紐約大學丹頓分校電氣和計算機工程以及機械和航空航天工程副教授Ludovic Righetti領導,與紐約大學丹頓分校的機器運動實驗室的合作者以及MPI-IS的研究小組合作,設計了該設備。使得更廣泛的機構和實驗室更容易進行機器人研究和教學,并且通過使用相同的開源平臺,允許研究人員匯編比較數據,這是朝著機器人技術快速發展邁出的關鍵一步。
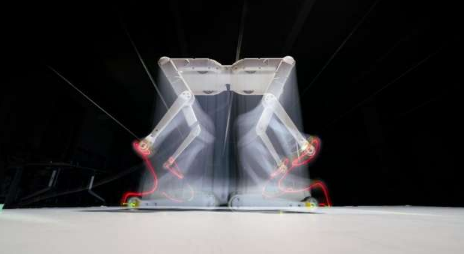
Solo 8的功能(包括扭矩控制的電動機和活動關節)使它的行為像更昂貴的機器人一樣:例如,它可以執行跳躍動作,以多種配置和方向行走,并在恢復姿勢后恢復姿勢,姿勢和穩定性。翻倒了。此外,Solo 8的所有組件都可以3D打印或在商店中購買,并且根據BSD 3條款許可,可在線免費獲取構造文件,從而使其他科學家在原型設計時可以利用模塊化設置。并開發自己的技術。
該機器人可以在以下領域進行研究:
探索基于動物的肢體運動以及在實驗室表面,礫石,土壤,沙子,泥土和其他此類地形上的運動
強化學習以應對復雜而動態的行為,包括那些將性能推向壓力極限的行為,而這對于嘗試使用昂貴的平臺而言過于冒險
動態運動(包括跑酷風格的行為),很少有機器人可以執行
操縱環境(例如打開門或按下按鈕)
機器人與先進通信技術的集成(該團隊正在與紐約大學無線研究所進行NSF資助的研究,以通過5G無線進行獨奏控制)
該項目由開放動力機器人倡議(Open Dynamic Robot Initiative)主持開發,于2016年由Righetti和MPI-IS研究人員機電工程師Felix Grimminger和動態運動研究小組負責人AlexanderBadri-Spröwitz共同發起。它最初由Righetti的ERC起始資金資助,然后由幾個MPI-IS的基層項目和美國國家科學基金會資助。
")
")
")
")

")
")
")
")
")
")
")
")
")
")
