您現在的位置是:首頁 >要聞 > 2020-11-25 08:53:05 來源:
低成本的機器人來研究大腦
模仿人體的機器人的兩個主要陷阱是對機器人的控制以及在以經濟高效的方式制造機器人時遇到的困難。來自HBP合作項目MoCoTi的研究人員設計了一個機器人原型,該機器人學習如何致動自己的四肢,并且可以輕松復制。該設備由控制腱驅動機器人手臂的人工大腦組成,可能是邁向低成本人形機器人的第一步。
行為和感覺與人類相似的機器人正在成為現實。它們由模仿人體的肌肉骨骼硬件和模擬大腦一部分的神經控制軟件組成。這些設備的一個問題是試圖以可行的方式批量生產它們所面臨的困難。
歐洲項目MoCoTi和Myorobotics的科學家創造了一種易于復制的機器人,旨在成為“低成本機器人”。“這是有可能的,因為它的模塊化設計允許相對高效的批量生產,”慕尼黑工業大學(德國)電氣和計算機工程系的講師,MoCoTi的主要研究人員之一克里斯托夫·里希特向SINC解釋。該項目現在正在英國格拉斯哥的人腦項目峰會上介紹。
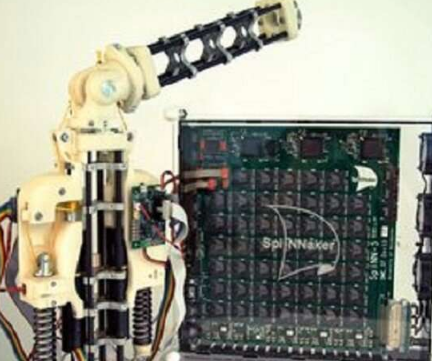
為了模仿人類手臂的肌肉和關節并賦予機器人更大的移動性,科學家們使用了Myorobotics系統。由機電裝置形成的九塊肌肉被協調以控制球形關節。其中一個與二頭肌相連,連接到兩個將肩膀連接到肘部的關節。
下一步是設計一個人造小腦,以控制運動系統的命令。里希特說:“小腦的神經元結構相對簡單統一。我們在實時仿真中重現最重要的神經元,它們的連通性以及(重要的是)它們的適應性和學習性。”
為了復制他們的行為,研究人員選擇了曼徹斯特大學(英國)開發的神經形態計算機平臺SpiNNaker。與臺式計算機相比,它的性能要優越得多:單個芯片可以實時管理10,000個神經元的網絡。數以千計的芯片可以互連,以模擬可觀的大腦規模的神經元網絡。
走向更成熟的大腦
里奇特說,原型機學會了以受控的方式運動,“包括姿勢的時間安排和控制”。它的優點包括它的彈性和可控性,這是人機交互中的一個重要方面。
根據研究人員的說法,可以使用所謂的硅視網膜或耳蝸傳感器來整合更高階的大腦結構,例如皮質網絡,神經形態視覺和聽覺。科學家在《IEEE機器人與自動化》雜志上發表的論文中說,這種類型的Android(具有越來越逼真的模擬功能)將成為研究大腦的非常有用的工具。
包括格拉納達大學科學家在內的作者強調說:“機器人將能夠幫助神經科學發展,就像神經科學可以幫助我們創造更多自然機器人一樣。”
")
")
")
")

")
")
")
")
")
")
")
")
")
")
