您現在的位置是:首頁 >綜合 > 2021-05-10 11:17:40 來源:
AI教授四足機器人如何在墜落時恢復
教學機器人走路是一回事,但是如何幫助他們學習如何從蹣跚學步中恢復?這是蘇黎世聯邦理工學院研究人員在人工智能(AI)的幫助下開展的不那么容易的壯舉。在一份新發表的論文(“ 使用深層強化學習的四足機器人的魯棒恢復控制器 ”)提交給預印本服務器Arxiv.org,他們描述了一個人工智能系統,它可以幫助機器人在絆倒后摔倒在地。
研究人員寫道:“在跌倒的情況下,動物通過推動周圍環境和四肢擺動來獲得動力,顯示出從任何姿勢中恢復的顯著能力。” “在腿式機器人中具有相似的能力將顯著提高其對抗故障的穩健性并擴展其在惡劣環境中的適用性。我們通過制定四足機器人強大恢復機動的控制策略來解決當前工作中的這個問題。“
他們的模型采用了一種稱為深度強化學習的人工智能訓練技術,該技術使用獎勵系統將駕駛員推向某些目標并控制機器人的恢復動作。在模擬環境中單獨訓練四種神經網絡策略(即策略),然后部署在具有12個自由度的四腿,狗大小的機器人ANYmal上。
控制器組件根據最近的觀察,命令,先前選擇的行為類型和先前的操作等因素,為機器人的給定情況選擇三種行為中的一種 - 運動,站立或自動扶正。另一個模塊 - 高度估算器 - 測量其基礎高度,以防止機器人偏離航向。
研究人員表示,人工智能驅動的政策避免了手工恢復規則和序列的需要,提供了優于許多流行控制方案的優勢。此外,他們被證明非常強大,因為他們能夠處理不可預測的情況,例如當機器人的腿被卡在其底部下方時。
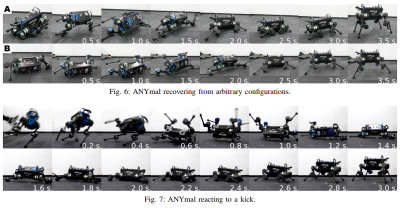
初步結果令人鼓舞。在機器人開始躺下的50次測試過程中,自我扶正政策設法在五秒內恢復。此外,它甚至在機器人的基座幾乎顛倒并且其腿被卡在其下方時也發現了成功,有時通過指示機器人在嘗試直立柱之前翻轉到其側面。在第二次實驗中,研究人員在行走或站立時踢了ANYmal,該政策設法恢復了47次,僅在機械四足動物的關節位置異常高時失敗。
研究人員承認,該系統僅在平地上進行了訓練和測試,這意味著當面臨陡峭的坡道或崎嶇的地形時,它可能會失敗。但是在未來的工作中,他們計劃通過隨機化模擬環境來解決這個限制。
他們寫道:“擬議的控制器展示了涉及多個地面接觸的動態恢復機動,由此產生的運動與模擬的運動一致。”
")


")


")



")
")
")
")
")
")
")
")
")