您現在的位置是:首頁 >綜合 > 2020-12-17 08:52:50 來源:
SLAP自主機器人的同時本地化和計劃
NASA噴氣推進實驗室(JPL),德克薩斯農工大學和卡內基梅隆大學的研究人員最近開展了一項研究項目,旨在實現自動機器人的同時定位和計劃(SLAP)功能。他們的論文發表在IEEE Transactions on Robotics上,提出了一種信念空間中的動態重新計劃方案,該方案對于不確定性(例如在變化的環境中)運行的機器人特別有用。
進行這項研究的研究人員之一Sung Kyun Kim對TechXplore表示:“在現實世界中運行的機器人需要應對不確定性。” “例如,火星漫游車要導航到科學目標位置,但它還需要避免與障礙物碰撞。因此,準確的定位和具有成本效益的路徑規劃都是必不可少的功能。”
對于在不確定性下運行的自主機器人,SLAP是一項關鍵功能,使它們能夠有效地導航空間,避開障礙物并規劃到達目標位置的路徑。甲機器人在不確定性下的順序決策過程可以配制為POMDP(部分可觀察馬爾可夫決策過程),其需要在線連續地解決。但是,確保機器人有效,準確地解決POMDP可能具有很大的挑戰性。
Kim解釋說:“我們提出了解決SLAP問題的兩個主要想法。” “一種方法是利用反饋控制器使信念狀態可達到。這可以有效地打破'歷史的詛咒',這有助于我們解決更大的問題。另一種方法是動態地重新計劃并在運行時改進決策,從而增強解決方案。質量和健壯性。當存在系統建模錯誤,動態環境變化或傳感器/執行器間歇性故障時,動態重新計劃特別有用。”
Kim和他的同事設計了一種信念空間的動態重新計劃方案,該方案可以使機器人在不確定的情況下(例如在變化的環境中或遇到意外障礙時)有效地導航周圍的空間。他們的算法有兩個階段,離線和在線。
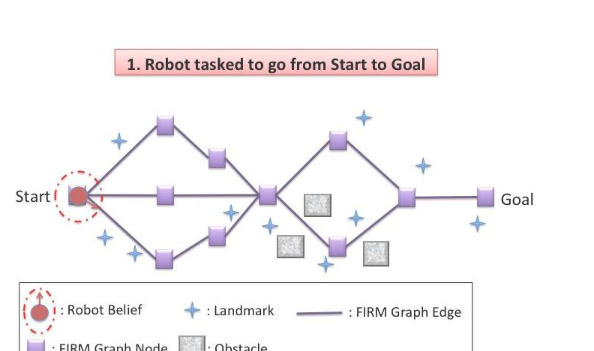
“在離線階段,我們的算法在信念空間中為每個節點構建一個帶有反饋控制器的稀疏圖,然后解決該圖上的粗略全局策略(決定對當前的信念狀態采取何種操作),” Kim說。“在在線階段,每次更新信念狀態時都會進行動態重新規劃。該算法會在本地評估移動到圖上附近節點的每個動作,并以最低的成本選擇一個動作。執行所選動作并更新后,按照目前的信念,它重復了重新計劃的過程。”
")





")
")
")
")
")
")
")
")
")
")